Professional Documents
Culture Documents
Diktat Teknik Pengaturan
Uploaded by
Dimas Sri MerdekaCopyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Diktat Teknik Pengaturan
Uploaded by
Dimas Sri MerdekaCopyright:
Available Formats
DASAR-DASAR
TEKNIK PENGATURAN
Oleh: Mohammad Dhandhang Purwadi
UNTUK KALANGAN SENDIRI JURUSAN TEKNIK MESIN, FAKULTAS TEKNIK
UNIVERSITAS NASIONAL 14 Juli 2002
Untuk: SYLVA RIJANTI, Taqiyya Maryam, Aqila Hanifah
a Tata letak & cetak dengan L TEX
M. Dhandhang P. Dasar-2 T. Pengaturan (Rev. Juli 2002)
Kata Pengantar
Puji syukur kehadhlirat Allah SWT, karena dengan berkah, rahmat dan hidayah-Nya diktat ini dapat diselesaikan. Tujuan utama dari penulisan diktat ini adalah untuk membantu mahasiswa dalam memahami isi perkuliahan Teknik Pengaturan. Dengan adanya diktat ini diharapkan mahasiswa dapat mengesiensikan proses dan waktu pemahaman terhadap materi yang disampaikan oleh dosen yang bersangkutan di depan kelas tanpa kehilangan waktu untuk mencatat. Dalam diktat ini dibahas masalah teknik pengaturan yang mendasar, sehingga pembaca akan dapat mengikuti isi buku ini dengan mudah. Persoalan teknik pengaturan yang lebih kompleks dan canggih, pembahasannya dapat diperoleh dari buku teks yang lengkap dan tersedia diperpustakaan universitas. 14 Juli 2002 Penulis
M. Dhandhang P. Dasar-2 T. Pengaturan (Rev. Juli 2002)
Daftar Isi
1 Pendahuluan 2 Transformasi Laplace dan Kebalikannya 2.1 2.2 2.3 2.4 Variabel dan Fungsi Kompleks . . . . . . . . . . . . . . . . . . Transformasi Laplace (Laplace Transform) . . . . . . . . . . . . Transformasi Laplace Balik (Invers Laplace Transform) . . . . Metode Ekspansi Fraksional . . . . . . . . . . . . . . . . . . . . 2.4.1 2.4.2 2.4.3 2.5 Kutup (pole) dan Zero . . . . . . . . . . . . . . . . . . . Ekspansi Fraksional Dengan Kutup Berbeda . . . . . . Ekspansi Fraksional Dengan Kutup Kembar . . . . . . . 7 10 11 11 12 13 14 15 17 19 22 27 27 29 31 36 37 37 38 40 40 42
Contoh Penggunaan Transformasi Laplace . . . . . . . . . . . .
3 Fungsi Alih 4 Diagram Blok 4.1 4.2 4.3 Diagram Blok Sistem Untai Tertutup . . . . . . . . . . . . . . . Prosedur Menggambar Diagram Blok . . . . . . . . . . . . . . . Penyederhanaan Diagram Blok . . . . . . . . . . . . . . . . . .
5 Analisis Respons Transien 5.1 Sistem Orde 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.1.1 5.1.2 5.1.3 5.2 Respons sistem orde 1 terhadap fungsi undak satuan . . Respons sistem orde 1 terhadap fungsi ramp satuan . . Respons sistem orde 1 terhadap fungsi impuls satuan .
Sistem Orde 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.2.1 Respons sistem orde 2 terhadap fungsi undak satuan . .
M. Dhandhang P. Dasar-2 T. Pengaturan (Rev. Juli 2002)
4 46 47 48 50 53 54 54 61 63 66
5.2.2 5.2.3 5.2.4 5.2.5 5.3
Respons sistem orde dua terhadap fungsi impuls satuan Respons sistem orde dua terhadap fungsi ramp satuan . Spesikasi respons transien . . . . . . . . . . . . . . . . Spesikasi respons transien dalam sistem orde dua . . .
Stabilitas, Kriteria Stabilitas Routh . . . . . . . . . . . . . . . 5.3.1 5.3.2 Analisis stabilitas dalam bidang kompleks . . . . . . . . Kriteria stabilitas Routh . . . . . . . . . . . . . . . . . .
6 Analisis Tempat Kedudukan Akar 6.1 6.2 Tempat kedudukan akar . . . . . . . . . . . . . . . . . . . . . . Cara menggambar tempat kedudukan akar . . . . . . . . . . . .
M. Dhandhang P. Dasar-2 T. Pengaturan (Rev. Juli 2002)
Daftar Gambar
1 2 3 4 5 6 7 8 9 10 11 Sistem pengatur kecepatan gubernur . . . . . . . . . . . . . . . Sistem pengendali kedudukan satelit . . . . . . . . . . . . . . . Struktur sistem suspensi kendaraan bermotor . . . . . . . . . . Contoh diagram blok . . . . . . . . . . . . . . . . . . . . . . . . Contoh diagram blok untai tertutup . . . . . . . . . . . . . . . Sistem peredam getaran roda sepeda motor . . . . . . . . . . . Pembuatan diagram blok . . . . . . . . . . . . . . . . . . . . . Aturan penyederhanaan diagram blok . . . . . . . . . . . . . . Contoh penyederhanaan diagram blok . . . . . . . . . . . . . . Contoh diagram blok sistem orde 1 . . . . . . . . . . . . . . . . Grak respons transien sistem orde 1 terhadap masukan undak satuan . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12 13 Bentuk sik dan diagram blok sistem servomekanika . . . . . . Grak respons transien sistem orde 2 terhadap masukan undak satuan . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14 15 Spesikasi respons transien terhadap fungsi undak satuan . . . Spesikasi respons transien terhadap fungsi undak satuan sistem orde 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16 17 18 19 20 21 Metode perhitungan . . . . . . . . . . . . . . . . . . . . . . . Daerah stabil dan tak stabil pada koordinat kompleks . . . . . Diagram blok suatu sistem untai tertutup . . . . . . . . . . . . Tempat kedudukan zero dan kutup dari persamaan (85) . . . . Langkah ke-1 dan ke-2 menggambar tempat kedudukan akar . . Langkah ke-3 dan ke-4 menggambar tempat kedudukan akar . . 51 52 55 61 65 68 70 44 49 39 40 8 23 25 28 29 31 32 33 34 37
M. Dhandhang P. Dasar-2 T. Pengaturan (Rev. Juli 2002)
6 75 77
22 23
Langkah 15 menggambar tempat kedudukan akar . . . . . . . Gambar lengkap tempat kedudukan akar . . . . . . . . . . . . .
Daftar Tabel
1 Matrikulasi koesien polinomial dalam kriteria Routh . . . . . 56
M. Dhandhang P. Dasar-2 T. Pengaturan (Rev. Juli 2002)
Pendahuluan
Pengaturan suatu sistem mempunyai peranan penting dalam banyak bi-
dang, diantaranya bidang rekayasa, sosial, ekonomi bahkan pemerintahan yang menyangkut berbagai aspek yang berkaitan secara canggih. Dalam bidang rekayasa (engineering), sistem pengaturan otomatis mempunyai peran yang sangat penting, misalnya dalam sistem pengendalian pesawat di luar angkasa, sistem pembidik misil taktis, sistem pilot pesawat terbang otomatis, sistem robotika. Contoh lain dapat pula berupa pengendalian tekanan, suhu dan kelembaban dalam bidang rekayasa proses. Karena pengetahuan tentang proses dan teknik pengaturan dapat memperbaiki dan megoptimalkan kinerja dari suatu sistem, maka teknik pengaturan harus difahami secara baik oleh seorang ahli yang menggeluti bidang ilmu dan teknologi. Sebelum mempelajari suatu ilmu, alangkah baiknya jika sebelumnya kita mengetahui sejarahnya, agar kita dapat lebih memahami duduk persoalannya mengapa ilmu tersebut dapat muncul kepermukaan dan dipakai oleh banyak orang. Secara historis, orang pertama yang menerapkan sistem pengaturan otomatis ialah James Watt. Pada abad delapan belas. Ilmuwan ini menerapkan sistem pengaturan gubernur sentrifugal pada mesin uapnya untuk mengatur kecepatan putaran mesin secara otomatis. Pada tahap berikutnya Minorsky, Hazen dan Nyquist mengembangkan teori tentang teknik pengaturan otomatis. Di tahun 1922 Minorsky yang bekerja dalam bidang pengendalian pesawat berhasil menunjukkan bahwa stabilitas sistem dapat ditentukan dari persamaan diferensial yang mewakili sistem tersebut. Nyquist pada tahun 1932 berhasil mengembangkan metode yang lebih sederhana dalam menentukan stabilitas suatu sistem untai tertutup berdasarkan pada respons untai
M. Dhandhang P. Dasar-2 T. Pengaturan (Rev. Juli 2002)
terbuka terhadap masukan berbentuk sinus (sinusoidal) yang tunak. Pada tahun 1934, Hazen Memperkenalkan istilah servomekanika untuk sistem pengaturan posisi dan membahas tentang perancangan rilai servomekanika yang mampu menutup dan membuka sesuai dengan perubahan masukan.
Gambar 1: Sistem pengatur kecepatan gubernur
Hingga tahun 1940, metode respons-frekuensi dipakai oleh para ilmuwan untuk mendapatkan kinerja yang memuaskan dari disain sistem pengaturan untai tertutup linear. Pada awal tahun 1950-an, Evan berhasil mengem-
bangkan metode tempat kedudukan akar (root locus). Baik metode responsfrekuensi maupun tempat kedudukan akar, keduanya adalah merupakan metode yang menjadi tulang punggung dari teori teknik pengaturan otomatis klasik. Pada tahun 1950, masalah pengaturan bergeser dari perancangan komponen sistem satu persatu menjadi perancangan keseluruhan sistem yang optimal. Perkembangan teknik pengaturan menuntut penyelesaian dari suatu sistem yang terdiri dari banyak masukan (input) dan luaran (output) dengan
M. Dhandhang P. Dasar-2 T. Pengaturan (Rev. Juli 2002)
keterkaitan yang sangat canggih. Dengan tersediannya mesin penghitung (komputer) pada tahun 60-an menjadikan teknik pengaturan otomatis modern semakin mampu untuk mengatasi masalah yang canggih. Dengan tersedianya komputer digital yang semakin murah, teknik pengaturan berkembang hingga melingkupi teknik pengaturan dari sistem pengaturan yang kompleks baik yang bersifat deterministik maupun stokhasitik, dan mempunyai kemampuan belajar serta beradaptasi secara mandiri. Bahkan dengan ketersediaan perangkat yang baik sekarang ini, teori pengaturan dapat bergerak dengan meniru sistem non-teknis, misalnya biologis, biomedis, ekonomi dan sosioekonomi. Pada akhirnya penulis berharap agar diktat ini dapat dipergunakan sebagai pegangan dasar dalam mempelajari teknik pengaturan. Dalam diktat ini hanya akan dibahas mengenai teori dari teknik pengaturan yang klasik yaitu meliputi teori respons-frekuensi dan tempat kedudukan akar. Diktat ini hanya memuat hal yang dasar dan dapat dipakai dengan mudah oleh mahasiswa S-1 yang telah mempelajari dasar matematika persamaan diferensial, transformasi Laplace, operasi matrik dasar.
M. Dhandhang P. Dasar-2 T. Pengaturan (Rev. Juli 2002)
10
Transformasi Laplace dan Kebalikannya
Dalam teknik pengaturan otomatis transformasi Laplace (Laplace trans-
form) merupakan suatu metode operasional yang utama. Dengan transformasi Laplace kita dapat menyelesaikan persamaan diferensial linear dengan mudah tanpa melalui metode penyelesaian persamaan diferensial yang kadang-kadang menimbulkan pesoalan aljabar yang rumit, misalnya metode variasi parameter, faktor integrasi dan lain sebagainya. Transformasi Laplace dapat mentransformasi fungsi umum (misalnya fungsi trigonometri, fungsi eksponensial dll.), operator diferensial, operator integral ke dalam bentuk persamaan aljabar biasa dalam variabel kompleks s. Dengan demikian persamaan diferensial dapat ditransformasikan dengan transformasi Laplace menjadi persamaan aljabar biasa dalam variabel komplek s. Bila variabel tak bebas pada persamaan ini diselesaikan (dengan cara mengelompokkan variabel bebas di ruas kanan dan variabel tak bebas di ruas kiri), maka penyelesaian dari persamaan diferensial dapat diperoleh dengan cara mentransformasi Laplace balik dari penyelesaian variabel tak bebas tersebut. Dalam mentransformasi Laplace dan transformasi baliknya telah tersedia tabel yang cukup seksama. Untuk ekspresi aljabar yang rumit, ekspresi tersebut dapat disederhanankan dengan teknik ekspansi fraksional. Beberapa keuntungan dari metode transformasi Laplace adalah: 1. Dengan tanpa menyelesaikan persamaan diferensial dari sistem yang ditinjau (setelah dilakukan transformasi Laplace), secara gras dapat ditentukan kinerja sistem yang bersangkutan. 2. Bila persamaan diferensial sistem telah dapat diselesaikan dengan metode transformasi Laplace, secara bersamaan akan dapat diperoleh pe-
M. Dhandhang P. Dasar-2 T. Pengaturan (Rev. Juli 2002)
11
nyelesaian baik komponen tunak (steady state) maupun transiennya (transient).
2.1
Variabel dan Fungsi Kompleks
Transformasi Laplace akan mengubah fungsi riil (dalam teknik penga-
turan biasanya fungsi waktu t) menjadi fungsi kompleks, s. Variabel kompleks mempunyai dua komponen, yaitu komponen riil dan komponen imaginer . Karena itu variabel kompleks s dapat ditulis sebagai s = + j. (1)
Fungsi kompleks,F (s), adalah fungsi dalam variabel kompleks s yang mempunyai komponen riil Fx dan komponen imaginer Fy . Fungsi kompleks F (s) dapat ditulis dalam komponennya sebagai F (s) = Fx + jFy , besar (magnitude) dari F (s) adalah |F (s)| =
q
(2)
2 2 Fx + Fy dan sudut dari F (s)
adalah = tan1 (Fy /Fx ). F (s) mempunyai konjugate F (s) = Fx jFy . Fungsi kompleks yang sering dijumpai dalam sistem pengaturan linear adalah fungsi dalam variabel s yang tunggal dan unik (berbeda dari yang lain) untuk satu nilai s tertentu.
2.2
Transformasi Laplace (Laplace Transform)
Secara matematis transformasi Laplace dapat didenisikan sebagai beri-
kut: L[f (t)] = F (s) =
Z
f (t)est dt,
(3)
M. Dhandhang P. Dasar-2 T. Pengaturan (Rev. Juli 2002)
12
dengan f (t) s L F (s)
: : : :
Suatu fungsi waktu t yang riil, f (t) = 0 bila t < 0, Variabel kompleks, Operator transformasi Laplace, Fungsi kompleks hasil transformasi dari f (t),
yang perlu diingat pada denisi di atas adalah transformasi Laplace dari f (t) akan menghasilkan F (s). Dengan notasi matematis dapat ditulis: L[f (t)] = F (s)
2.3
Transformasi Laplace Balik (Invers Laplace Transform)
Transformasi Laplace Balik dapat didenisikan sebagai berikut: L1 [F (s)] = f (t) = 1 2j
Z
c+j
F (s)est ds,
(4)
cj
dengan F (s) t L1 f (t)
: : : :
Suatu fungsi kompleks dalam s, Variabel waktu yang bersifat riil, Operator transformasi Laplace balik, Fungsi waktu hasil transformasi balik dari F (s).
Dalam transformasi Laplace balik, fungsi kompleks F (s) ditransformasi balik ke fungsi dengan variabel riil (biasanya waktu t), f (t). Dengan notasi matematis dapat ditulis: L1 [F (s)] = f (t). Untuk mempermudah operasi transformasi Laplace dan transformasi Laplace balik, biasanya digunakan tabel berikut ini. Pada tabel ini hanya ditampilkan transformasi dasar saja untuk selebihnya dapat dilihat pada bukubuku matematika acuan anda.
M. Dhandhang P. Dasar-2 T. Pengaturan (Rev. Juli 2002)
13
No 1 2 3 4 5 6 7 8 9
1 (n1)!
f (t) Impuls satuan (t) Undak satuan l(t) Ramp satuan
tn1 (n1)!
F (s) 1
1 s 1 s2 1 sn n! sn+1 1 (s+a)
(n = 1,2,3,...) (n=1,2,3,...)
tn
eat tn1 eat sin t cos t
(n=1,2,3,...)
1 (s+a)n s2 + 2 s s2 + 2
Selain tabel transformasi Laplace di atas, terdapat pula sifat-sifat transformasi Laplace yang berguna, beberapa diantaranya yang sering dipakai dalam analisis teknik pengaturan otomatis adalah sebagai berikut: 1 2 3 4 5 6
2
L[Af (t)] = AF (s) L[f1 (t) + f2 (t)] = F1 (s) + F2 (s)
t L[f ( a )] = aF (as) d L[ dt f (t)] = sF (s) f (0) d L[ dt2 f (t)] = s2 F (s) sf (0) f(0)
L[
Rt
0
f (t)dt] =
F (s) s
2.4
Metode Ekspansi Fraksional
Dalam persoalan analisis teknik pengaturan otomatis sering dijumpai hasil
transformasi Laplace yang dapat ditulis dalam bentuk fraksional sebagai: F (s) = B(s) , A(s) (5)
M. Dhandhang P. Dasar-2 T. Pengaturan (Rev. Juli 2002)
14
B(s) dan A(s) adalah berbentuk polinomial dalam variabel s, dan orde dari B(s) lebih kecil dari pada A(s). Bila timbul bentuk F (s) seperti persamaan (5) di atas, maka biasanya bentuk tersebut dapat diekspansi atas beberapa suku dalam bentuk yang lebih mudah untuk ditransformasi-balikkan. Ekspansi tersebut adalah sebagai berikut, F (s) = F1 (s) + F2 (s) + F3 (s) + . . . + Fn (s). (6)
Transformasi Laplace balik dari bentuk persamaan yang sudah terekspansi tersebut adalah: L1 [F (s)] = L1 [F1 (s)] + L1 [F2 (s)] + L1 [F3 (s)] + . . . + L1 [Fn (s)] = f1 (t) + f2 (t) + f3 (t) + . . . + fn (t) 2.4.1 Kutup (pole) dan Zero (7)
Sebelum melanjutkan pembahasan mengenai metode ekspansi fraksional, sebaiknya kita fahami lebih dahulu arti dari istilah kutup dan zero. Dalam teknik pengaturan otomatis, akan sering dijumpai persoalan fungsi kompleks dengan bentuk umum seperti dalam persamaan (5), berikut ini adalah salah satu contoh bentuk persamaan (5). F (s) = K(s + z1 )(s + z2 ) . . . (s + zm ) B(s) = A(s) (s + p1 )(s + p2 ) . . . (s + pn ) (m < n) (8)
Pada persamaan (8) di atas, F (s) berbentuk fraksional dengan pembilang B(s) dan penyebut A(s) berupa polinomial. Pembilang B(s) berupa polinomial dalam z. Akar dari persamaan B(s) = 0 adalah (s1 = z1 ), (s2 = z2 ),. . . (sm = zm ). Akar dari B(s) ini disebut zero. Jadi pada persamaan (8) terdapat m buah zero.
M. Dhandhang P. Dasar-2 T. Pengaturan (Rev. Juli 2002)
15
Akar dari persamaan A(s) = 0 (pada penyebut), yaitu (s1 = p1 ), (s2 = p2 ), . . . (sn = pn ), disebut kutup (pole), dengan demikian pada persamaan (8) terdapat n buah kutub. Contoh dari bentuk fraksional yang sering dijumpai adalah sebagai berikut: F (s) = s2 (s + 4) s+4 = + 3s + 2 (s + 1)(s + 2) (9)
pada persamaan ini terdapat satu buah zero yaitu s = 4 dan dua buah kutup yaitu s = 1 dan s = 2. Pada pembahasan berikutnya, akan banyak dijelaskan bahwa karakteristik atau sifat suatu sistem pengaturan otomatis akan sangat dipengaruhi oleh kondisi dan kedudukan dari kutup dan juga zero. 2.4.2 Ekspansi Fraksional Dengan Kutup Berbeda
Ekspansi fraksional dilakukan terhadap suatu fungsi kompleks F (s) dengan tujuan agar diperoleh bentuk yang lebih sederhana sehingga transformasi Laplace balik dapat dilakukan dengan mudah. Bila fungsi kompleks F (s) mempunyai kutup yang berbeda satu dan lainnya, maka untuk ekspansi fraksional dapat digunakan metode sebagai berikut. Misalnya dalam persoalan teknik pengaturan ditemui fungsi kompleks F (s) yang dapat ditulis sebagai: F (s) = K(s + z1 )(s + z2 ) . . . (s + zm ) B(s) = A(s) (s + p1 )(s + p2 ) . . . (s + pn ) (m < n). (10)
Bentuk fraksional ini sulit untuk ditransformasi Laplace balik, karena hanya terdiri dari satu suku dan komposisinya cukup kompleks. Agar transformasi Laplace balik mudah dilakukan bentuk fraksional ini dapat diubah menjadi beberapa suku yang sederhana: F (s) = a2 an a1 B(s) + + ... . = A(s) s + p1 s + p2 s + pn (11)
M. Dhandhang P. Dasar-2 T. Pengaturan (Rev. Juli 2002)
16
Persamaan (11) jauh lebih sederhana dari bentuk aslinya dan mudah untuk ditransformasi Laplace balikkan. Konstanta ak (k = 1, 2, . . . n) dapat dihitung dengan persamaan berikut. B(s) ak = (s + pk ) A(s)
(k = 1, 2, . . . , n)
s=pk
(12)
Dari uraian ekspansi fraksional di atas, jelas terlihat bahwa informasi nilai kutup-kutup (p1 , p2 , . . . pn ) tetap terjaga, sedang nilai zero lebur dalam ak . Pada pembahasan kemudian, akan diketahui bahwa nilai kutup dari fungsi kompleks sebuah sistem pengaturan otomatis akan mempunyai arti penting yang berkaitan dengan sifat dari sistem yang bersangkutan. Berikut ini diberikan contoh pemakaian ekspansi fraksional, bila fungsi kompleks F (s) mempunyai kutup yang berbeda.
Contoh : Gunakan metode ekspansi fraksional untuk menentukan transformasi Laplace balik dari fungsi kompleks F (s) berikut ini: F (s) = (s + 4) s+4 = + 3s + 2 (s + 1)(s + 2)
s2
Ekspansi fraksional dari fungsi kompleks F (s) ini adalah F (s) = a1 a2 (s + 4) = + (s + 1)(s + 2) s+1 s+2
Berdasarkan persamaan (12) pada hal.16, a1 dan a2 dapat diperoleh sebagai berikut s+4 s+4 1 + 4 = = =3 a1 = (s + 1) (s + 1)(s + 2) s=1 s + 2 s=1 1 + 2 s+4 s+4 2 + 4 = = a2 = (s + 2) = 2 (s + 1)(s + 2) s=2 s + 1 s=2 2 + 1
M. Dhandhang P. Dasar-2 T. Pengaturan (Rev. Juli 2002)
17
Jadi 3 2 3 2 + = s+1 s+2 s+1 s+2 3 2 L1 L1 [F (s)] = L1 s+1 s+2 F (s) = f (t) = 3et 2e2t
2.4.3
Ekspansi Fraksional Dengan Kutup Kembar
B(s) , A(s)
Dalam suatu fungsi kompleks F (s) =
dapat saja terjadi akar-akar
A(s) = 0 mempunyai nilai sama atau kembar. Dalam hal ini dapat saja kembar dua, tiga, empat dst. Dengan kata lain fungsi F (s) dikatakan mempunyai kutup kembar berganda. Pada kondisi yang demikian itu, metode ekspansi fraksional yang telah dibahas di atas tidak dapat digunakan lagi. Bagaimana cara melakukan ekspansi fraksional pada fungsi kompleks yang memiliki kutup kembar, mari kita perhatikan penjelasan berikut ini. Untuk lebih mudahnya, dalam menjelaskan ekspansi fraksional dengan kutup kembar, digunakan pembahasan dengan contoh. Berikut ini terdapat suatu fungsi kompleks F (s) yang dapat ditulis sebagai: F (s) = s2 + 2s + 3 , (s + 1)3 (13)
fungsi F (s) di atas mempunyai tiga buah kutup yang sama, yaitu s = 1. Fungsi F (s) pada persamaan (13) diekspansikan dalam tiga suku (sesuai dengan jumlah kutupnya) sebagai F (s) = b2 b1 b3 B(s) + + = 3 2 A(s) (s + 1) (s + 1) (s + 1) (14)
Nilai dari b1 , b2 , b3 harus kita tentukan, caranya adalah sebagai berikut. Pertama, kalikan kedua ruas persamaan (14) dengan (s + 1)3 seperti langkah
M. Dhandhang P. Dasar-2 T. Pengaturan (Rev. Juli 2002)
18
berikut. (s + 1)3 atau (s + 1)3 B(s) = b3 + (s + 1) b2 + (s + 1)2 b1 A(s) (16) B(s) b3 b2 b1 + (s + 1)3 + (s + 1)3 = (s + 1)3 (15) A(s) (s + 1)3 (s + 1)2 (s + 1)
jika pada persamaan ini disubtitusikan langsung nilai s = 1 pada ruas kanan (ruas kiri disubtitusikan secara tak langsung), maka akan diperoleh
B(s) (s + 1) A(s)
3
= b3
(17)
s=1
dengan persamaan ini kita dapat menghitung nilai b3 . Berikutnya, bila ruas kanan persamaan (16) didiferensialkan terhadap s secara langsung, dan ruas kirinya didiferensialkan secara tak langsung, akan diperoleh B(s) d (s + 1)3 = b2 + (s + 1) b1 ds A(s)
(18)
Subtitusikan nilai s = 1 secara langsung pada ruas kanan dan secara tak langsung pada ruas kiri dari persamaan (18) akan diperoleh: B(s) d (s + 1)3 ds A(s)
= b2
(19)
s=1
Sekarang kita peroleh persamaan untuk menghitung nilai b2 . Persamaan untuk menghitung b1 dapat diperoleh dengan cara mendeferensialkan lagi persamaan (18), hasilnya adalah B(s) 1 d2 (s + 1)3 = 2 b1 2 ds A(s) 2!
( )
d2 B(s) (s + 1)3 2 ds A(s)
= b1 (20)
s=1
M. Dhandhang P. Dasar-2 T. Pengaturan (Rev. Juli 2002)
19
Langkah selanjutnya adalah menerapkan persamaan untuk menghitung b1 , b2 , b3 yang telah kita peroleh dari persamaan (14), hasilnya adalah: B(s) b3 = (s + 1) A(s)
3
B(s) d b2 = (s + 1)3 ds A(s) = (2s + 2)s=1 = 0
(
= (s2 + 2s + 3)s=1 = 2
s=1
s=1
d 2 = s + 2s + 3 ds )
s=1
d2 B(s) 1 b1 = (s + 1)3 2 ! ds2 A(s) 1 = (2) = 1 2
s=1
1 2
d2 2 s + 2s + 3 s=1 2 ds
Dengan lengkapnya nilai b1 , b2 , b3 , persamaan (14) dapat ditulis menjadi: F (s) = 0 1 2 B(s) + + = 3 2 A(s) (s + 1) (s + 1) (s + 1)
Bila persamaan ini ditransformasi Laplace balikkan, akan diperoleh: L
1
[F (s)] = L
f (t) = t2 et + 0 + et = (t2 + 1) et
2 0 1 + L1 + L1 3 2 (s + 1) (s + 1) (s + 1) t0
2.5
Contoh Penggunaan Transformasi Laplace
Pada bagian ini akan diberikan contoh penggunaan transformasi Laplace
dan kebalikannya untuk persoalan yang sering timbul dalam teknik pengaturan otomatis.
Contoh : Karakteristika sebuah sistem pengaturan otomatis diwakili dengan persamaan diferensial di bawah ini. Tentukan respons transien x(t) dari sistem pengaturan otomatis ini. x + 3x + 2x = 0 x(0) = 2, x(0) = 3
M. Dhandhang P. Dasar-2 T. Pengaturan (Rev. Juli 2002)
20
pada persamaan di atas x =
d2 x(t), dt2
x=
d x(t). dt
Transformasi Laplace dari komponen penyusun persamaan diferensial tersebut adalah L[x] = L[x(t)] = X(s) L[x] = s X(s) x(0) = s X(s) 2 L[] = s2 X(s) s x(0) x(0) = s2 X(s) 2 s 3 x Bila hasil transformasi Laplace disubtitusikan ke dalam persamaan diferensial sistem di atas, diperoleh: [s2 X(s) 2 s 3] + 3 [s X(s) 2] + 2 X(s) = 0 s2 X(s) 2 s 3 + 3 s X(s) 6 + 2 X(s) = 0 s2 X(s) + 3 s X(s) + 2 X(s) 2 s 3 6 = 0 s2 X(s) + 3 s X(s) + 2 X(s) = 2 s + 3 + 6 (s2 + 3s + 2) X(s) = 2 s + 3 + 6 X(s) = 2s + 9 2s + 3 + 6 = 2 + 3s + 2 s (s + 1)(s + 2)
Dengan menerapkan ekspansi fraksional, diperoleh X(s) = a1 a2 2s + 9 = + (s + 1)(s + 2) s+1 s+2
pada persamaan ini a1 dan a2 dapat diperoleh dengan: 2s + 9 2s + 9 2 + 9 = = =7 (s + 1)(s + 2) s=1 s + 2 s=1 1 + 2 2s + 9 2s + 9 4 + 9 = = = 5 a2 = (s + 2) (s + 1)(s + 2) s=2 s + 1 s=2 2 + 1 a1 = (s + 1) X(s) = 7 5 7 5 + = s+1 s+2 s+1 s+2
M. Dhandhang P. Dasar-2 T. Pengaturan (Rev. Juli 2002)
21
Respons transien x(t) dapat diperoleh dengan mentransformasi Laplace balik X(s), x(t) = L1 [X(s)], yaitu:
1 1
7 5 L1 x(t) = L [X(s)] = L s+1 s+2 1 1 1 1 = 7L 5L = 7 et 5 e2t s+1 s+2
M. Dhandhang P. Dasar-2 T. Pengaturan (Rev. Juli 2002)
22
Fungsi Alih
Di dalam teori pengaturan, istilah fungsi alih (transfer function) biasanya
digunakan untuk melukiskan sifat-sifat hubungan antara masukan dan luaran suatu komponen sistem maupun sistem secara keseluruhan yang dapat diekspresikan sebagai persamaan diferensial linear dalam fungsi waktu. Secara teoritis fungsi alih dari persamaan diferensial linear dalam fungsi waktu didenisikan sebagai perbandingan atau rasio hasil transformasi Laplace antara luaran (fungsi respons) dan masukan (fungsi pengendali) dibawah asumsi bahwa semua kondisi awal nol. Dengan persamaan matematis denisi fungsi alih G(s) dapat ditulis sebagai: Fungsi alih = G(s) = L[Luaran] L[Masukan] kondisi awal nol (21)
Bila sebuah sistem diwakili dengan persamaan diferensial linear dalam fungsi waktu sebagai berikut, a0 y (n) + a1 y (n1) + . . . + an1 y + an y = b0 x(m) + b1 x(m1) + . . . + bm1 x + bm x, (22) maka fungsi alihnya adalah: Fungsi alih = G(s) = b0 sm + b1 sm1 + . . . + bm1 s + bm Y (s) = X(s) a0 sn + a1 sn1 + . . . + an1 s + an (23)
Dengan menggunakan konsep fungsi alih, dinamika sistem yang berupa persamaan diferensial (persamaan (22) ) dapat dinyatakan dalam bentuk persamaan aljabar biasa dalam variabel s. Pada fungsi alih di atas pangkat tertinggi dari variabel s pada penyebut adalah n, karena itu sistem pengaturan yang diwakili oleh fungsi alih tersebut dikatakan sebagai sistem orde-n. Untuk mendapatkan fungsi alih dari sebuah sistem dapat diikuti langkahlangkah berikut ini:
M. Dhandhang P. Dasar-2 T. Pengaturan (Rev. Juli 2002)
23
1. Tulislah persamaan diferensial yang mewakili sifat dinamika sistem 2. Lakukan transformasi Laplace pada persamaan diferensial yang diperoleh dengan asumsi semua kondisi awal nol 3. Perbandingkan antara luaran dan masukan Contoh : Sebuah sistem pengendali kedudukan satelit di luar angkasa mempunyai cara pengaturan kedudukan dengan cara penyemprotan roket seperti terlihat pada Gambar 2. Pada sistem pengendali satelit tersebut kemiringan satelit diatur dengan nosel roket A dan B yang bekerja secara sinkron. Semprotan roket sebuah nosel A atau B masing-masing adalah F/2 dan menghasil kan torsi T =
F 2
` + F ` = F `. Perubahan torsi dengan waktu dinyatakan den2
gan T (t), dan momen inersia pada titik pusat massanya adalah J. Tentukan fungsi alih dari sistem pengendali satelit ini.
Gambar 2: Sistem pengendali kedudukan satelit
M. Dhandhang P. Dasar-2 T. Pengaturan (Rev. Juli 2002)
24
Tahap 1: Berdasarkan hukum Newton untuk gaya dapat diperoleh persamaan: J d2 (t) = T (t). dt2
Persamaan ini mewakili sistem pengendali satelit di atas. Tahap 2: Transformasi Laplace dari persamaan sistem pengendali satelit tersebut dengan asumsi semua kondisi awal pada saat t = 0 bernilai nol diperoleh d2 (t) ] = L[T (t)] dt2 J s2 (s) s (0) (0) = T (s), J L[ karena semua kondisi awal nol, maka (0) = 0 dan (0) = 0. Dengan demikian persamaan diatas berubah menjadi: J s2 (s) = T (s), pada sistem pengendali satelit di atas, torsi T yang timbul karena gaya dorong nosel roket merupakan masukan, sedangkan hasil atau luarannya adalah perubahan sudut . Dengan demikian diperoleh fungsi alih yang tidak lain adalah perbandingan antara luaran dan masukan sebagai Fungsi alih = (s) 1 [Luaran] = = [Masukan] T (s) J s2
Contoh : Sebuah sistem suspensi kendaraan bermotor mempunyai struktur seperti Gambar 3. Pada sistem ini bekerja gaya gravitasi terhadap massa m ke arah vertikal (ke bawah). Gaya gravitasi Fgrv akan mendapat perlawanan dari gaya pegas Fpgs dan gaya dari peredam kejut Fpkj . Besarnya masing-masing gaya tersebut dapat didenisikan sebagai berikut: x Fgrv = m.a = mo , Fpgs = k(xo xi ), Fpkj = b(xo xi )
M. Dhandhang P. Dasar-2 T. Pengaturan (Rev. Juli 2002)
25
Gambar 3: Struktur sistem suspensi kendaraan bermotor
dengan xo =
dxo dt
dan xo =
d2 xo . dt2
Komposisi kesetimbangan gaya yang bekerja pada suspensi diperoleh: Fgrv = Fpgs + Fpkj mo = k(xo xi ) b(xo xi ) x
Bila persamaan kesetimbangan gaya di atas ditranformasi Laplace dengan menganggap semua kondisi awal sama dengan nol, akan diperoleh m s2 Xo (s) = k(Xo (s)Xi (s))b(s Xo (s)s Xi (s)) = (b s+k) (Xi (s) Xo (s)) m s2 Xo (s) = (b s + k) (Xi (s) Xo (s)) bila persamaan tersebut dibagi dengan Xi (s) pada kedua ruasnya (nilai persamaan tidak akan berubah), akan diperoleh m s2 Xo (s) (b s + k) = (Xi (s) Xo (s)) Xi (s) Xi (s)
M. Dhandhang P. Dasar-2 T. Pengaturan (Rev. Juli 2002)
26
Xo (s) Xo (s) Xo (s) Xo (s) (b s + k) 1 ms = (b s + k) 1 = 2 Xi (s) Xi (s) Xi (s) ms Xi (s) Xo (s) (b s + k) (b s + k) Xo (s) Xo (s) (b s + k) Xo (s) (b s + k) = + = Xi (s) m s2 m s2 Xi (s) Xi (s) m s2 Xi (s) m s2 2 ms (b s + k) Xo (s) (b s + k) Xo (s) (b s + k) (b s + k) 1+ + = = 2 2 2 2 ms Xi (s) ms ms ms Xi (s) m s2 m s2 + b s + k Xo (s) m s2 (b s + k) Xo (s) (b s + k) = = 2 2 2 +bs+ k ms Xi (s) ms Xi (s) ms m s2 Xo (s) (b s + k) = Xi (s) m s2 + b s + k
2
Beberapa hal yang perlu dicatat tentang fungsi alih adalah: Fungsi alih adalah model matematis yang digunakan untuk mengkaji pengaruh masukan terhadap luaran dari persamaan diferensial suatu sistem. Fungsi alih adalah sifat unik yang dimiliki oleh sistem yang bersangkutan, tidak bergantung terhadap besarnya masukan ataupun fungsi pengendali. Di dalam fungsi alih telah terjalin satuan penting yang berkaitan dengan masukan dan luaran. Bila fungsi alih sistem telah diketahui, kita dapat mempelajari luaran sistem terhadap berbagai jenis masukan. Bila fungsi alih sulit untuk diturunkan secara matematis (teoritis), fungsi alih dapat diperoleh dengan cara eksperimen dengan cara memberi masukan tertentu (yang telah diketahui) pada sistem dan mencatat perilaku luarannya.
M. Dhandhang P. Dasar-2 T. Pengaturan (Rev. Juli 2002)
27
Diagram Blok
Sebuah sistem pengaturan bisa terdiri dari beberapa komponen. Untuk
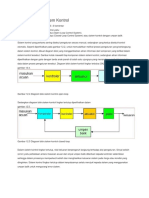
menunjukkan fungsi dan kinerja dari setiap komponen dalam teknik pengaturan digunakan diagram yang disebut diagram blok. Pada bagian ini akan dibahas tentang bagaimana memperoleh diagram blok dari suatu sistem, dan bagaimana teknik yang harus digunakan dalam penyederhanaan diagram blok menjadi diagram yang mudah difahami dan dianalisis. Diagram blok sebenarnya adalah suatu metode untuk merepresentasikan fungsi dari setiap komponen sistem dan arah aliran sinyal yang mengalir antara satu komponen ke komponen lain. Berbeda dengan metode matematis, metode gras ini mempunyai suatu keuntungan yaitu bahwa aliran sinyal dapat direpresentasikan dalam bentuk yang lebih realistis dan mudah difahami. Dalam diagram blok terdapat komponen-komponen sebagai berikut: Blok, adalah suatu kesatuan yang mempunyai fungsi tertentu dan disimbolkan dengan kotak persegi panjang. Di dalam sebuah blok tertulis suatu fungsi yang menunjukkan fungsi alih dari komponen yang diwakili oleh blok tersebut. Lihat Gambar 4. Titik gabung, adalah suatu titik pertemuan antara beberapa aliran sinyal dengan operasi penjumlahan atau pengurangan. Lihat Gambar 4. Titik cabang, adalah suatu titik tempat terjadinya percabangan aliran sinyal. Lihat Gambar 4
4.1
Diagram Blok Sistem Untai Tertutup
Gambar 5 hal.29 adalah salah satu contoh dari diagram blok dengan un-
tai tertutup yang sering dijumpai. Pada contoh diagram blok tersebut sinyal
M. Dhandhang P. Dasar-2 T. Pengaturan (Rev. Juli 2002)
28
Gambar 4: Contoh diagram blok
luaran C(s) dipisahkan pada titik cabang dan diumpan-balikkan ke masukkan R(s) melalui suatu titik gabung pengurangan. Sebelum diumpan-balikkan ke titik gabung terlebih dahulu dilalukan pada komponen dengan fungsi alih H(s). Melalukan sinyal umpan-balik pada suatu komponen seperti ini adalah suatu hal yang sering dijumpai, karena dimensi sinyal output dan sinyal input biasanya berbeda. Dengan melalukan sinyal output pada H(s) diharapkan sinyal output diubah dimensinya sehingga mempunyai dimensi yang sama dengan sinyal input yang akan digabungkan. Perlu dicatat bahwa penggabungan dua satuan dengan dimensi yang berbeda secara sik tidak dapat dilakukan, misalnya penggabungan dua satuan seperti suhu dan tekanan. Pada gambar tersebut luaran C(s) diperoleh dengan cara mengalikan fungsi alih komponen G(s) dengan masukkan E(s). Sedangkan sinyal kesalahan aktuasi E(s) adalah E(s) = R(s) B(s), dan umpan baliknya B(s) = H(s) C(s). Dari Gambar 5 hal.29, dapat didenisikan Fungsi alih untai terbuka, Fungsi alih umpan maju dan Fungsi alih untai tertutup sebagai berikut:
M. Dhandhang P. Dasar-2 T. Pengaturan (Rev. Juli 2002)
29
Gambar 5: Contoh diagram blok untai tertutup
B(s) = H(s) C(s); C(s) = G(s)E(s) B(s) = H(s) G(s) E(s) Fungsi alih untai terbuka = B(s) = G(s) H(s) E(s) C(s) Fungsi alih umpan maju = = G(s) E(s)
(24) (25) (26)
Fungsi alih untai tertutup dapat diturunkan sebagai berikut: C(s) = G(s) E(s) dan E(s) = R(s) B(s) = R(s) H(s) C(s) C(s) = G(s) [R(s) H(s) C(s)] C(s) + G(s) H(s) C(s) = G(s) R(s) C(s) [1 + G(s) H(s)] = G(s) R(s) Fungsi alih untai tertutup = C(s) G(s) = R(s) 1 + G(s) H(s) (27)
4.2
Prosedur Menggambar Diagram Blok
Untuk menggambar diagram blok dari sebuah sistem, pertama kali yang
harus dilakukan adalah menurunkan persamaan diferensial yang mewakili di-
M. Dhandhang P. Dasar-2 T. Pengaturan (Rev. Juli 2002)
30
namika proses yang terjadi pada setiap komponen dari sistem tersebut. Kemudian persamaan tersebut ditransformasi Laplace dengan asumsi semua kondisi awal nol. Selanjutnya masing-masing persamaan yang telah ditransformasi Laplace diekspresikan dengan satu blok. Pada akhir langkah, blok-blok tersebut digabungkan menjadi satu kesatuan diagram blok yang mewakili sistem secara kesatuan. Secara garis besar langkah-langkah tersebut dapat ditulis sbb: 1. Tulis persamaan diferensial dinamika proses setiap komponen sistem 2. Transformasi Laplace-kan setiap persamaan diferensial dengan mengambil asumsi bahwa kondisi awal (pada t = 0) bernilai nol 3. Ekspresikan setiap persamaan dengan diagram blok secara terpisah 4. Gabungkan seluruh blok diagram komponen menjadi satu kesatuan Berikut ini akan dikemukakan salah satu contoh menggambar diagram blok. Gambar 6 hal.31 adalah bentuk model dari peredam getaran pada sebuah roda dari sepeda motor. Persamaan yang mendiskripsikan bekerjanya gaya-gaya pada komponen pegas, peredam kejut dan massa m adalah sebagai berikut: m0 = F x F = b(x0 xi ) k(x0 xi ). Transformasi Laplace, dari kedua persamaan di atas dengan asumsi kondisi
M. Dhandhang P. Dasar-2 T. Pengaturan (Rev. Juli 2002)
31
Gambar 6: Sistem peredam getaran roda sepeda motor
awal nol adalah: m s2 X0 (s) = F (s) F (s) = b [s X0 (s) s Xi (s)] k [X0 (s) Xi (s)] = (b s + k) [Xi (s) X0 (s)] (29) (28)
Diagram blok dari persamaan (28) dan (29) dapat dilihat pada Gambar 7(a). Gambar 7(b) adalah diagram blok hasil penggabungan dari diagram blok kompenen pada Gambar 7(a)
4.3
Penyederhanaan Diagram Blok
Bila sistem pengaturan yang kita amati cukup kompleks dan rumit, maka
diagram blok yang dihasilkan dengan cara yang telah dijelaskan, menjadi kompleks juga. Karena itu perlu adanya penyederhanaan diagram blok dengan diagram yang lebih sederhana dan mudah untuk difahami.
M. Dhandhang P. Dasar-2 T. Pengaturan (Rev. Juli 2002)
32
Gambar 7: Pembuatan diagram blok
Penyederhanaan yang dimaksud adalah, misalnya ada dua blok yang terpasang secara seri, maka kedua blok ini dapat disederhanakan menjadi satu blok. Beberapa hal yang harus diperhatikan dan diingat dalam menyederhanankan diagram blok adalah: Fungsi alih maju dari hasil penyederhanaan komponen harus tetap sama Fungsi alih melingkari untai yang ada harus tetap sama Dalam penyederhanaan diagram blok, terdapat beberapa aturan yang dapat dipakai sebagai pedoman penyederhaan. Aturan tersebut dapat dilihat pada Tabel yang ditunjukkan dalam Gambar 8.
M. Dhandhang P. Dasar-2 T. Pengaturan (Rev. Juli 2002)
33
Gambar 8: Aturan penyederhanaan diagram blok
M. Dhandhang P. Dasar-2 T. Pengaturan (Rev. Juli 2002)
34
Gambar 9: Contoh penyederhanaan diagram blok
M. Dhandhang P. Dasar-2 T. Pengaturan (Rev. Juli 2002)
35
Sebagai contoh, Gambar 9 pada hal.34 menggambarkan bagaimana penyederhanaan tersebut dapat dilakukan. Pada gambar (a), terlihat diagram blok yang sangat kompleks. Setelah dilakukan penyederhanaan, pada hasil akhir (gambar (e)) terlihat bahwa diagram blok hanya terdiri dari satu blok saja, yang merupakan fungsi alih dari seluruh sistem (pada awalnya diwakili oleh diagram blok yang rumit). Jadi jelas bahwa tujuan akhir dari penyederhanaan ini adalah mendapatkan fungsi alih dari keseluruhan sistem. Proses penyederhanaan diagram blok pada Gambar 9 hal.34 secara ringkas dapat dijelaskan sebagai berikut: 1. Gambar (a) menunjukkan gambar asli dari sistem yang rumit 2. Dengan menggunakan aturan nomor 6 pada Gambar 8 yang dikenakan pada H2 , dari gambar (a) dapat diubah menjadi (b) 3. Dengan menggunakan aturan nomor 13 pada Gambar 8 yang dikenakan pada G1 , G2 , dan H1 diperoleh gambar (c). Dengan aturan yang sama yang dikenakan pada
H2 G1 G2 , 1G1 G2 H1 G1
dan G3 diperoleh gambar (d). Se-
lanjutnya aturan yang sama menghasilkan gambar (e)
M. Dhandhang P. Dasar-2 T. Pengaturan (Rev. Juli 2002)
36
Analisis Respons Transien
Dalam perancangan sebuah sistem, setelah dilakukan perancangan bentuk
sik dan model matematisnya dibuat maka dengan berbagai metode analisis, kinerja sistem dapat diselidiki. Setelah perancangan sistem selesai, diperlukan suatu analisis mengenai kinerja sistem terhadap berbagai masukan. Tetapi pada kenyataannya di lapangan, bagaimana bentuk masukan yang nyata tidak diketahui secara pasti. Karena itu untuk menguji respons transien (kinerja) sistem digunakan masukkan berupa fungsi-fungsi sederhana yang dapat mewakili kondisi umum masukan yang nyata. Dengan cara ini dapat dilakukan evaluasi terhadap sistem yang telah dirancang dan selanjutnya perbaikan dapat dilakukan dengan lebih seksama berdasarkan pertimbangan dari hasil pengujian respons transien sistem. Fungsi sederhana yang sering digunakan untuk menguji respons transien diantaranya adalah fungsi undak, fungsi ramp, fungsi percepatan, fungsi impuls dan fungsi sinus dlsb. Karena fungsi-fungsi tersebut sangat sederhana, maka analisis respons transien dapat dilakukan dengan mudah dan relatif cepat. Transformasi Laplace dari fungsi uji yang sangat sering digunakan adalah sebagai berikut: Nama fungsi Fungsi impuls satuan Fungsi undak satuan Fungsi ramp satuan Transformasi Laplace 1
1 s 1 s2
M. Dhandhang P. Dasar-2 T. Pengaturan (Rev. Juli 2002)
37
5.1
Sistem Orde 1
Contoh sik dari sistem orde satu misalnya adalah rangkaian RC, sistem
termal dlsb. Sebagai ilustrasi untuk sistem orde satu dapat dilihat diagram blok pada Gambar 10 berikut ini.
Gambar 10: Contoh diagram blok sistem orde 1
Fungsi alih dari Gambar 10 dapat diperoleh dari gambar (b) sebagai berikut: 1 C(s) = R(s) Ts + 1 (30)
Pada persamaan (30) terlihat bahwa pangkat tertinggi dari s pada penyebut adalah satu, karena itu sistem di atas disebut sistem orde satu. Dalam pembahasan berikut ini, akan dibahas mengenai pengujian sistem orde 1 di atas dengan berbagai fungsi masukan agar diperoleh respons transien atau kinerja dari sistem. 5.1.1 Respons sistem orde 1 terhadap fungsi undak satuan
Dari tabel transformasi Laplace diperoleh bahwa transformasi Laplace fungsi undak satuan adalah 1 . Dengan demikian bila sistem orde satu di atas s diberi masukan fungsi undak satuan, maka R(s) =
1 , s
dan persamaan (30)
M. Dhandhang P. Dasar-2 T. Pengaturan (Rev. Juli 2002)
38
dapat ditulis sebagai: C(s) = 1 1 1 R(s) = Ts + 1 Ts + 1 s (31)
Dengan menggunakan ekspansi fraksional, seperti pada persamaan (11) hal.15, diperoleh C(s) = T 1 . s Ts + 1 (32)
Respons transien sistem orde 1 terhadap masukan fungsi undak satuan dapat ditentukan dengan mentransformasi Laplace balik persamaan (32), yaitu: 1 T ] L1 [C(s)] = L1 [ s T s+1 1 T ] = L1 [ ] L1 [ s T s+1 c(t) = 1 et/T (t 0). (33)
Persamaan ini menunjukkan respons transien sistem orde 1 bila diberi masukkan fungsi undak satuan. Keluaran pada kondisi awal dapat diperoleh dengan memasukkan nilai t = 0, yaitu c(t) = 0 (e0 = 1), dan keluaran pada kondisi mendekati jenuh dapat diperoleh dengan memasukkan nilai t = . Pada saat t = T , c(T ) = 0.632. Dari fungsi respons ini dapat dilihat bahwa konstanta waktu T mempunyai peran terhadap kesigapan respons terhadap masukkan. Semakin kecil nilai T , respons sistem menjadi semakin cepat. Grak fungsi c(t) pada persamaan (33) dapat dilihat pada Gambar 11 di halaman 39 5.1.2 Respons sistem orde 1 terhadap fungsi ramp satuan
1 , s2
Transformasi Laplace dari fungsi ramp satuan adalah masukkan R(s) =
1 s2
dengan memberi
persamaan (30) dapat ditulis sebagai: C(s) = 1 1 1 . R(s) = Ts + 1 T s + 1 s2 (34)
M. Dhandhang P. Dasar-2 T. Pengaturan (Rev. Juli 2002)
39
Gambar 11: Grak respons transien sistem orde 1 terhadap masukan undak satuan
Penerapan metode ekspansi fraksional (persamaan (11) hal.15) pada persamaan (34) menghasilkan C(s) = T T2 1 + . s2 s Ts + 1 (35)
Transformasi Laplace balik dari persamaan ini akan menghasilkan respon transien sebagai berikut. 1 T T2 + ] s2 s T s+1 1 T T2 ] L1 [C(s)] = L1 [ 2 ] L1 [ ] + L1 [ s s T s+1 L1 [C(s)] = L1 [ c(t) = t T + T et/T (t 0). (36)
Sifat-sifat dari respons transien ini dapat diselidiki dengan menggambar grak dari fungsi c(t).
M. Dhandhang P. Dasar-2 T. Pengaturan (Rev. Juli 2002)
40
5.1.3
Respons sistem orde 1 terhadap fungsi impuls satuan
Masukan untuk fungsi impuls satuan adalah R(s) = 1, maka persamaan (30) dapat ditulis sebagai: C(s) = 1 1 R(s) = 1. Ts + 1 Ts + 1 (37)
Respons transien yang diperoleh dari persamaan (37)adalah c(t) = 1 t/T e T (t 0). (38)
5.2
Sistem Orde 2
Salah satu contoh sik dari sistem orde dua adalah sistem servomekanik
seperti terlihat pada Gambar 12. Gambar (a) menunjukkan skema sik rangkaian servomekanik, gambar (b) adalah digram bloknya. Digram blok dari sistem servomekanik yang telah disederhanakan diperlihatkan pada gambar (c).
Gambar 12: Bentuk sik dan diagram blok sistem servomekanika
M. Dhandhang P. Dasar-2 T. Pengaturan (Rev. Juli 2002)
41
Dari diagram blok Gambar 12(c) diperoleh fungsi alih sistem sebagai berikut K K C(s) = = 2 +Bs+K R(s) s(J s + B) + K Js dengan K = J = B = (K0 K1 K2 )/(n Ra ) J0 /n2 [b0 + (K2 K3 /Ra )]/n2 (39)
: Konstanta : Momen inersia pd poros luaran : Koesien friksi viskositas pd poros luaran
Penyebut persamaan (39) menunjukkan bahwa pangkat tertinggi dari variabel s adalah 2 (dua), dengan demikian jelas sistem tersebut adalah sistem orde dua. Kutup (lihat kembali penjelasan tentang kutup di halaman 14 ) dari fungsi alih untai tertutup persamaan (39) dapat berupa bilangan kompleks atau riil. Kutup persamaan tersebut akan berupa bilangan imaginer bila B 2 4JK < 0, dan bilangan riil bila B 2 4JK 0. Dengan rumus ABC, penyebut dari persamaan (39) dapat difaktorisasi, sehingga persamaan (39) dapat ditulis sebagai K/J C(s) = 2 R(s) s + B/Js + K/J = s+
B/J 2
K/J
2 ( B/J ) 2
K/J
s+
B/J 2
2 ( B/J ) 2
K/J
(40)
Dalam sistem orde dua sering dipakai parameter-parameter yang berhubungan dengan konstanta B, J, dan K. Parameter yang akan didenisikan berikut ini tidak dipakai pada sistem orde satu. Berikut ini adalah denisi dari parameter atenuasi (), frekuensi alam tak-teredam (n ) dan rasio redaman (). K 2 = n , J B = 2 n = 2 J (41)
M. Dhandhang P. Dasar-2 T. Pengaturan (Rev. Juli 2002)
42
Rasio redaman itu sendiri adalah perbandingan antara redaman nyata (B) dan redaman kritis (Bc = 2 JK), yaitu = B B = Bc 2 JK (42)
Dengan mensubtitusikan parameter yang telah didenisikan pada persamaan (41) dan (42), fungsi alih sistem orde dua, persamaan (39) hal.41, dapat diubah menjadi:
2 C(s) n = 2 2 R(s) s + 2n s + n
(43)
Kini fungsi alih sistem orde dua dapat dinyatakan dengan dua paramter, yaitu n dan . Bila 0 < < 1 kutup-kutup akan berada pada daerah tidak stabil (pada penjelasan berikutnya akan dibahas bahwa daerah tidak stabil adalah daerah yang berada disebelah kanan dalam bidang kompleks) dan sistem dalam kondisi teredam-kurang sehingga sistem akan berosilasi terus menerus. Untuk = 1 dan > 1, sistem akan berada dalam kondisi teredam dan teredam-lebih. Pada kondisi ini sistem tidak berosilasi. Bila = 0, respons transien dari sistem akan tidak berkesudahan (terus menerus ada dan tak berhenti, lihat Gambar 13 hal.44). 5.2.1 Respons sistem orde 2 terhadap fungsi undak satuan
Sekarang kita akan menentukan respon transien dari sistem orde dua terhadap masukan fungsi undak satuan (R(s) = 1 ) dengan bentuk matematis s yang mewakilinya adalah fungsi alih persamaan (43). Tidak seperti sistem orde satu, pada sistem orde dua ini kita mempunyai tiga kemungkinan kondisi yaitu teredam-kurang 0 < < 1, teredam kritis = 1 dan teredam-lebih > 1. Karena itu dalam menerapkan masukan fungsi undak satuan, ketiga kondisi tersebut harus diperhitungkan juga.
M. Dhandhang P. Dasar-2 T. Pengaturan (Rev. Juli 2002)
43
Teredam kurang (0 < < 1): Fungsi alih sistem pengaturan orde dua dapat ditulis kembali sebagai berikut.
2 2 n n C(s) = = 2 , (44) 2 R(s) s + 2n s + n (s + n + jd )(s + n jd ) d = n 1 2 adalah frekuensi alam teredam. Dengan memasukkan
fungsi undak satuan, R(s) = 1 , persamaan (44) menjadi: s C(s) =
2 1 n 2 + 2 s + 2 s s n n 1 s + 2n = 2 2 s s + 2n s + n 1 n s + n = 2 2 + 2 s (s + n ) (s + n )2 + d d
(45)
Transformasi Laplace balik dari persamaan ini adalah: 1 s + n n ] L1 [ ] L1 [C(s)] = L1 [ ] L1 [ 2 2 + 2 s (s + n ) (s + n )2 + d d n c(t) = 1 en t cos d t en t sin d t d n = 1 en t cos d t + sin d t n 1 2 n t =1e cos d t + sin d t 1 2 ! 1 2 en t 1 =1 sin d t + tan (t 0) (46) 1 2 Persamaan (46) adalah respons transien sistem orde dua terhadap masukan undak satuan. Dari persamaan ini diketahui bahwa frekuensi dari transien osilasi adalah frekuensi alam teredam d yang bervariasi dengan . Ilustrasi yang menggambarkan respons transien sistem orde dua dengan berbagai nilai dapat dilihat pada Gambar 13
M. Dhandhang P. Dasar-2 T. Pengaturan (Rev. Juli 2002)
44
Gambar 13: Grak respons transien sistem orde 2 terhadap masukan undak satuan
Sinyal kesalahan (error) untuk sistem ini dapat diperoleh dari selisih antara masukan dan luaran, yaitu: Kesalahan = Masukan Luaran e(t) = r(t) c(t) = en t cos d t +
sin d t 1 2
(t 0)
(47)
Bila persamaan ini digambar akan diperoleh grak kesalahan yang berbentuk osilasi sinus teredam. Pada kondisi tunak dengan t = diperoleh e() = 0, dengan demikian pada kondisi tunak tidak ada kesalahan antara masukan dan
M. Dhandhang P. Dasar-2 T. Pengaturan (Rev. Juli 2002)
45
luaran atau dengan kata lain pada kondisi tunak luaran akan sesuai dengan masukan. Hal ini berlaku untuk 0 < < 1, bila = 0 maka akan diperoleh e(t) = cos d t. Berarti sistem akan mempunyai kesalahan terus menerus dan berosilasi dengan modus sinusuidal, dari respons transien juga membuktikan hal ini, yaitu c(t) = 1 cos n t Teredam kritis ( = 1): Pada kasus ini dua kutup dari fungsi alih (C(s)/R(s)) mempunyai nilai yang hampir sama, karena itu dapat dilakukan pendekatan teredam kritis. Fungsi alih sistem orde dua pada kondisi teredam kritis dapat ditulis sbb:
2 2 2 n n n C(s) = 2 = , = 2 2 2 R(s) s + 2n s + n s + 2n s + n (s + n )2
(48)
bila pada masukan diberikan fungsi undak satuan (R(s) = 1 ), akan diperoleh: s C(s) =
2 n (s + n )2 s
(49)
Transformasi Laplace balik dari persamaan ini adalah L1 [C(s)] = L1
2 n (s + n )2 s
c(t) = 1 en t (1 + n t)
(50)
Pada persamaan ini tidak muncul faktor sinusuidal, yang ada hanya modus eksponensial, jadi tidak akan ada osilasi. Grak dari respons transien untuk sistem ini dapat dilihat pada Gambar 13 hal.44 dengan = 1
Teredam lebih ( > 1): Dalam kasus ini dua kutup dari fungsi alih (C(s)/R(s)) mempunyai nilai negatip riil yang berbeda. Fungsi alih sistem orde dua pada kondisi teredam lebih dapat ditulis sbb:
M. Dhandhang P. Dasar-2 T. Pengaturan (Rev. Juli 2002)
46
bila pada masukan diberikan fungsi undak satuan (R(s) = 1 ), akan diperoleh: s C(s) = (s + n + n
2 1 n 2 2 1)(s + n n 1) s
2 2 n C(s) n p p = 2 (51) = 2 R(s) s + 2n s + n (s + n + n 2 1)(s + n n 2 1)
(52)
Transformasi Laplace balik dari persamaan ini akan diperoleh: 2 1 2 e(+ 1)n t c(t) =1 + 2 2 1( + 1) 2 1 2 e( 1)n t 2 2 1( 1) 2 2 e(+ 1) n t n e( 1) n t =1 + 2 2 1 ( + 2 1)n ( 2 1)n
(t 0) (53)
Pada persamaan ini tidak muncul modus sinusuidal, modus yang dominan adalah eksponensial, karena itu pada Gambar 13 hal.44 untuk > 1 tidak terlihat adanya osilasi. Semakin besar nilai dari satu, akan menghasilkan peluruhan eksponensial yang lebih cepat. 5.2.2 Respons sistem orde dua terhadap fungsi impuls satuan
Transformasi Laplace dari fungsi impuls satuan adalah 1, jadi R(s) = 1. Fungsi alih sistem orde 2 setelah menerima masukan berbentuk fungsi impuls satuan dapat ditulis sebagai berikut: C(s) =
2 2 n n R(s) = 2 2 2 s2 + 2n s + n s + 2n s + n
(54)
Transformasi Laplace balik dari persamaan (54) akan menghasilkan respons transien sebagai berikut: 0<1 c(t) =
p n en t sin n 1 2 t 2 1
(55)
M. Dhandhang P. Dasar-2 T. Pengaturan (Rev. Juli 2002)
47
=1
2 c(t) = n t en t
(56)
>1 2 2 n n e(+ 1) n t 2 e( 1) n t c(t) = 2 2 1 2 1 5.2.3 Respons sistem orde dua terhadap fungsi ramp satuan (57)
Respons transien sistem orde dua terhadap fungsi ramp dapat diperoleh dengan metode langsung. Pada pembahasan ini akan dipelajari kesalahan tunak dari sistem orde dua yang diberi masukan fungsi ramp. Persamaan kesalahan tunak dapat ditulis sebagai berikut: E(s) = J s2 + B s R(s) J s2 + B s + K (58)
Tanpa menggunakan transformasi Laplace, dapat diperoleh e(t) sebagai berikut: e(t) = lim s E(s)
s0
= lim s
J s2 + B s 1 s0 J s2 + B s + K s2 B 2 = = K n
(59)
dengan =
B , 2 KJ
n =
Hingga di sini telah dibahas mengenai respons transien dari suatu sistem orde dua terhadap masukan yang berupa fungsi undak satuan, impuls satuan dan ramp satuan. Dari jenis respons transien ini, respons terhadap masukan fungsi undak satuan mempunyai arti penting, yaitu dengan mengetahui respons transien terhadap fungsi undak satuan, secara matematis, respons
K . J
M. Dhandhang P. Dasar-2 T. Pengaturan (Rev. Juli 2002)
48
terhadap sembarang masukan dapat diketahui. Karena itu respons terhadap fungsi undak satuan sering dijadikan acuan dalam mengevaluasi disain sistem pengaturan dalam dunia industri. 5.2.4 Spesikasi respons transien
Untuk kepraktisan di lapangan, banyak kasus menunjukkan bahwa sifat kinerja sistem pengaturan yang ditinjau dispesikasikan dengan istilah-istilah yang mewakili suatu kuantitas dalam domain waktu (sebagai fungsi waktu atau yang berkaitan dengan waktu). Pada kenyataannya, kebanyakan sistem pengaturan memperlihatkan sifat kinerja sebagai sistem osilasi teredam sebelum mencapai kondisi tunak (lihat Gambar 14 hal.49). Berkaitan dengan sifat ini (osilasi teredam), berikut ini akan dijelaskan beberapa denisi parameter karakteristika respons transien terhadap masukan fungsi undak satuan. Denisi dari parameter yang sering dipakai pada sistem osilasi teredam dapat dijelaskan sebagai berikut. (Lihat Gambar 14 hal.49). 1. Waktu tunda (delay time), td : Waktu yang diperlukan oleh respons (fungsi respons) untuk mencapai setengah dari nilai akhir osilasi atau kondisi tunak (lihat td pada Gambar 14). 2. Waktu naik (rise time), tr : Waktu yang diperlukan oleh respons (fungsi respons) untuk naik 10% 90%, 5% 95%, atau 0% 100% dari nilai akhirnya. Untuk sistem orde 2 teredam-kurang waktu naik yang dipakai mempunyai pengertian yaitu waktu untuk naik dari 0% 100%. Untuk sistem teredam-lebih dipakai denisi waktu untuk naik dari 10% 90%
M. Dhandhang P. Dasar-2 T. Pengaturan (Rev. Juli 2002)
49
Gambar 14: Spesikasi respons transien terhadap fungsi undak satuan
3. Waktu puncak (peak time), tp : Waktu yang diperlukan oleh respons (fungsi respons) untuk mencapai puncak pertama dari overshoot. 4. Overshoot maksimum (maximum overshoot), Mp : Nilai puncak maksimum kurva respons yang diukur dari nilai satu. Bila nilai tunak dari respons tidak sama dengan satu, maka untuk parameter ini biasanya digunakan persen overshoot maksimum yang didenisikan sebagai Persen overshoot maksimum = c(tp ) c() 100%. c() (60)
Nilai ini menunjukkan stabilitas relatif dari sistem. Untuk jelasnya lihat
M. Dhandhang P. Dasar-2 T. Pengaturan (Rev. Juli 2002)
50
Mp pada Gambar 14. 5. Waktu settling (settling time), ts : Waktu yang diperlukan oleh kurva respons untuk mencapai dan terus berada pada rentang suatu nilai presentasi absolut yang telah ditentukan (biasanya 2% = 0.02 atau 5% = 0.05) di sekitar nilai akhir atau nilai tunaknya. 5.2.5 Spesikasi respons transien dalam sistem orde dua
Di atas telah dijelaskan mengenai spesikasi respons transien dari suatu sistem osilasi teredam. Sistem dengan karakter osilasi teredam yang telah kita pelajari adalah sistem orde dua, dengan respons transiennya ditunjukkan oleh persamaan (46) hal.43. Pada bagian ini akan diuraikan tentang contoh untuk mendapatkan waktu naik, waktu puncak, overshoot maksimum, waktu settling dari sistem orde yang respons transiennya ditunjukkan dalam persamaan (46) hal.43. Untuk mempermudah penjelasan pada bagian ini dicantumkan kembali Gambar 15 hal.51 yang memuat titik-titik dari spesikasi respons transien. Waktu naik, tr : Waktu naik dapat diperoleh dengan cara c(tr ) = 1, dengan cara ini persamaan (46) hal.43 dapat ditulis kembali sebagai c(tr ) = 1 en tr atau en tr
cos d tr +
sin d tr 1 2
=1
(61)
cos d tr + sin d tr 1 2
=0
(62)
pada persamaan ini jelas pasti bahwa en tr 6= 0, karena itu sebagai konsekuensinya adalah
cos d tr + sin d tr 1 2
=0
(63)
M. Dhandhang P. Dasar-2 T. Pengaturan (Rev. Juli 2002)
51
Gambar 15: Spesikasi respons transien terhadap fungsi undak satuan sistem orde 2
atau sin d tr = cos d tr 1 2 tan d tr = 1 2 d = d 1 1 Jadi tr = tan = d d
(64)
adalah suatu konstanta yang dapat ditentukan dengan Gambar 16 hal.52 ! n 1 2 d 1 1 = tan . berikut ini, yaitu = tan Waktu puncak, tp : Parameter ini dapat diperoleh dengan mendiferensialkan
M. Dhandhang P. Dasar-2 T. Pengaturan (Rev. Juli 2002)
52
Gambar 16: Metode perhitungan
fungsi respons transien c(t) terhadap waktu, t dan kemudian nilai tersebut di
d nolkan ( dt c(t) = 0).
n d = (sin d tp ) ed tp = 0 c(t) dt t=tp 1 2 Pada persamaan ini n / 1 2 6= 0 dan ed tp 6= 0, karena itu
(65)
sin d tp = 0 d tp = 0, , 2, 3 . . . (66)
Karena waktu puncak hanya berkaitan dengan puncak overshoot yang pertama maka d tp = tp = d (67)
Overshoot maksimum, Mp : Nilai maksimum terjadi pada waktu puncak, tp ,
M. Dhandhang P. Dasar-2 T. Pengaturan (Rev. Juli 2002)
53
atau dengan kata lain t = tp = /d . Dengan demikian dapat ditulis Mp = c(tp ) 1 = e
n (/d )
= e(/d ) = e(/
cos + sin 1 2
1 2 )
(68)
Persen overshoot maksimum adalah e(/d ) 100%. Waktu settling, ts : Nilai dari waktu settling dapat ditentukan sesuai dengan aturan toleransi yang digunakan (2% atau 5%), Masing-masing dapat dihitung dengan persamaan sebagai berikut: ts = 4 4 = n 3 3 = ts = n untuk aturan toleransi 2% untuk aturan toleransi 5% (69) (70)
5.3
Stabilitas, Kriteria Stabilitas Routh
Dari bagian terdahulu, telah dibahas bahwa untuk suatu sistem yang telah
dirancang perlu diselidiki stabilitasnya, dengan melihat respons transiennya. Karena, seperti terlihat pada Gambar 13 hal.44, untuk nilai = 0 respons transien sistem orde dua menunjukkan gejala tidak stabil. Dalam merancang suatu sistem pengaturan, sistem yang tidak stabil selalu dihindari, dan harus dicarikan upaya untuk menstabilkan sistem. Selain dengan cara menyelidiki respons transien dari suatu sistem, stabilitas sistem dapat pula diketahui dengan metode Routh. Dengan metode ini, tanpa harus mencari serpons transien sistem, dengan hanya melihat kedudukan/posisi kutup dalam koordinat kompleks dapat ditentukan apakah sistem akan stabil atau tidak.
M. Dhandhang P. Dasar-2 T. Pengaturan (Rev. Juli 2002)
54
5.3.1
Analisis stabilitas dalam bidang kompleks
Stabilitas suatu sistem untai tertutup (closed-loop) linear dapat ditentukan dari kedudukan atau lokasi kutup-kutupnya dalam koordinat kompleks. Apabila suatu sistem mempunyai kutub yang berada pada lokasi di sebelah kanan dari = 0 (sebelah kanan setengah koordinat kompleks), maka sistem tersebut akan menjadi tak-stabil. Untuk lebih jelas lihat Gambar 17 hal.55. Jika sistem mempunyai satu kutup atau lebih yang berada di sisi sebelah kanan, maka dengan berjalannya waktu kutup-kutup tersebut menjadi mode yang dominan, sehingga respons sistem akan berosilasi dan secara monoton amplitudo osilasi meningkat sehingga sistem menjadi sangat tidak stabil, dan kalau sistem dibiarkan beroperasi terus, pada suatu saat akan terdapat komponen sistem yang rusak. Sebaliknya apabila semua kutup dari suatu sistem berada di sisi sebelah kiri, garis = 0, maka mode yang dominan akan menyebabkan amplitudo osilasi menurun secara monoton, hingga suatu saat respon sistem akan konvergen di suatu nilai tertentu. Sistem semacam ini akan stabil. Stabilitas sistem dengan kutup berada disebelah kiri tidak dijamin penuh bila letak kutup sangat dekat dengan sumbu j. Karena itu perlu adanya jarak tertentu dari sumbu j yang dapat menjamin keamanan stabilitas sistem. 5.3.2 Kriteria stabilitas Routh
Kriteria stabilitas Routh adalah suatu metode untuk menentukan lokasi kutup (di sebelah kiri atau kanan garis = 0) tanpa harus melakukan faktorisasi polinomial penyebut dari fungsi alih sistem. Fungsi alih suatu sistem dapat berbentuk sebagai berikut: B(s) b0 sm + b1 sm1 + . . . + bm1 s + bm C(s) = = R(s) A(s) a0 sn + a1 sn1 + . . . + an1 s + an (m n) (71)
M. Dhandhang P. Dasar-2 T. Pengaturan (Rev. Juli 2002)
55
Gambar 17: Daerah stabil dan tak stabil pada koordinat kompleks
Bila n mempunyai nilai lebih dari dua, maka untuk mendapatkan kutup-kutup dari sistem diperlukan waktu yang lama dan berbelit-belit karena harus melakukan faktorisasi. Untuk mengatasi kesulitan ini, dapat digunakan metode Routh. Dengan kriteria stabilitas Routh, polinomial penyebut A(s) tidak perlu difaktorisasi, dan kriteria stabilitas Routh dapat menentukan apakah ada kutup yang berada disebelah kanan dari sistem koordinat kompleks atau tidak. Bagaimana kriteria Routh dapat menentukan stabilitas sistem, berikut ini dikemukakan prosedur dari Kriteria stabilitas Routh 1. Tuliskan polinomial penyebut dari fungsi alih, A(s), seperti bentuk berikut ini. a0 sn + a1 sn1 + . . . + an1 s + an = 0 (72)
dengan semua koesien (a0 . . . an ) semuanya riil dan asumsi bahwa tidak
M. Dhandhang P. Dasar-2 T. Pengaturan (Rev. Juli 2002)
56
ada akar (kutub) bernilai nol (an 6= 0). Persamaan ini sering disebut sebagai Persamaan karakteristik. 2. Bila pada koesien polinomial A(s) terdapat nilai nol atau negatip diantara satu atau lebih koesien yang bernilai positip, maka terdapat akar dari polinomial tersebut yang imaginer dan mempunyai komponen rill positip (komponen riil positip selalu terletak di sebelah kanan garis = 0). Dengan demikian sistem akan mempunyai kutup yang terletak pada daerah tidak stabil pada Gambar 17 hal.55. Karena itu, untuk kasus seperti ini sistem pasti tak-stabil. 3. Apabila semua koesien polinomial mempunyai nilai positip, maka untuk menentukan stabilitas, koesien-koesien tersebut disusun dalam bentuk matriks dengan aturan sebagai berikut: koeesen b1 . . . bn , c1 . . . cn ,
Tabel 1: Matrikulasi koesien polinomial dalam kriteria Routh sn sn1 sn2 sn3 sn4 . . . s2 s1 s0 : : : : : : : : a0 a1 b1 c1 d1 . . . e1 f1 an a2 a3 b2 c2 d2 . . . e2 a4 a5 b3 c3 d3 a6 a7 b4 c4 d4 ... ... ... ... ...
d1 . . . dn dan seterusnya pada Tabel 1 dapat dihitung dengan cara sebagai
M. Dhandhang P. Dasar-2 T. Pengaturan (Rev. Juli 2002)
57
berikut: b1 = c1 = d1 = . . . a1 a2 a0 a3 ; a1 b1 a3 a1 b2 ; b1 c1 b2 b1 c2 ; c1 . . . b2 = c2 = d2 = a1 a4 a0 a5 ; a1 b1 a5 a1 b3 ; b1 b3 = c3 = a1 a6 a0 a7 ... a1
(73) (74) (75)
b1 a7 a1 b4 ... b1
c1 b3 b1 c3 ... c1
menurut kriteria Routh, Jumlah akar dari persamaan (72) hal.55 (atau jumlah kutup dari persamaan (71) hal.54 ) yang berada pada daerah positip (sisi sebelah kanan) atau dearah tak-stabil sama jumlahnya dengan banyaknya perubahan tanda yang terjadi pada koesien-koesien kolom pertama pada matrikulasi Tabel 1 (a0 , a1 , b1 , c1 , d1 , . . . g1 ). Perlu diketahui, bahwa dalam hal ini, cukup tanda dari koesien kolom pertama saja yang perlu diketahui. Nilai absolutnya tidak mutlak untuk dihitung. Dengan demikian dapat difahami bahwa untuk menyelidiki stabilitas suatu sistem dengan kriteria Routh tidak memerlukan penyelesaian fungsi alih secara lengkap, tetapi cukup dengan menyusun matrikulasi Routh dan menghitung perubahan tanda pada koesien dalam kolom pertama. Dari prosedur 2 dan 3 dalam kriteria Routh, dapat disimpulkan bahwa suatu sistem akan stabil bila dan hanya bila : Semua koesien pada persamaan (72) hal.55 mempunyai nilai positip dan bila koesien tersebut disusun dalam bentuk matrikulasi Tabel 1 hal.56 tidak terjadi perubahan tanda pada koesien dalam kolom pertamanya. Contoh : Untuk mempermudah pemahaman, diberikan contoh berikut
M. Dhandhang P. Dasar-2 T. Pengaturan (Rev. Juli 2002)
58
ini. s4 + 2s3 + 3s2 + 4s + 5 = 0, matrikulasi dari persamaan ini adalah :
s4 s3 s s
2
: : : : :
1 2
2314 = 2 1425 1
3 4 1
2510 2
5 0 =5
s1
0
pada matrikulasi di atas, baris s4 dan s3 dapat diperoleh dari koesien polinomial secara langsung. Jika terdapat baris yang kehabisan koesien dapat digantikan secara langsung dengan nol, pada contoh ini angka nol pada baris s3 di bawah angka 5 diperoleh dengan cara itu. Baris s2 dan s1 diperoleh dengan menggunakan persamaan (73) dan (74). Koesien pada baris s0 diperoleh langsung dari koesien polinomial. Hasil perhitungan dari matrikulasi di atas dapat ditulis sebagai berikut: s4 s3 s2 s1 s0
: : : : :
1 2 1 6 5
3 4 5
5 0
Pada hasil akhir ini, koesien pada kolom pertama adalah (1, 2, 1, 6, 5). Tanda dari koesien ini secara berurutan adalah (+, +, +, , +). Jadi terdapat dua kali perubahan tanda, yaitu pertama dari positip ke negatip dan yang kedua dari negatip ke positip. Dengan demikian sistem yang dianalisis ini mempunyai dua buah kutup yang berada di sisi kanan
M. Dhandhang P. Dasar-2 T. Pengaturan (Rev. Juli 2002)
59
(daerah tak-stabil) dari bidang kompleks, karena terdapat dua kali perubahan tanda pada kolom pertama matrikulasi kriteria Routh. Untuk memperjelas cara menghitung perubahan tanda dapat dikaji contoh berikut ini + + + + + + + + + + + + + + + + + + + + + + + :1 :2 :2 :3 :4 :5 perubahan perubahan perubahan perubahan perubahan perubahan 1 2 2 3 4 5 kutup kutup kutup kutup kutup kutup di di di di di di sisi sisi sisi sisi sisi sisi kanan kanan kanan kanan kanan kanan
Contoh : Berikut ini adalah contoh penggunaan kriteria Routh untuk menentukan rentang stabilitas sistem, dalam kasus stabilitas bersyarat. Tentukan batas nilai K dari sistem dengan fungsi alih berikut ini agar sistem tetap stabil. K C(s) = 2 + s + 1)(s + 2) + K R(s) s(s persamaan karakteristik dari fungsi alih ini adalah s(s2 + s + 1)(s + 2) + K = 0 s4 + 3s3 + 3s2 + 2s + K = 0 matrikulasi koesien Routh untuk persamaan ini adalah
s4 s3 s s
2
: : : : :
1 3
7 3
3 2 K
K 0
s1
0
9 K 7
M. Dhandhang P. Dasar-2 T. Pengaturan (Rev. Juli 2002)
60
koesien pada kolom pertama adalah (1, 3, 7 , (2 9 K), K). Tanda dari 3 7 koesien tersebut adalah (+, +, +, ?, ?). ? menunjukkan bahwa tanda untuk koesien yang bersangkutan bergantung nilai K. Karena itu agar tidak terjadi perubahan tanda pada kolom pertama K harus memenuhi syarat berikut:
9 pada baris s1 : 2 K > 0 7 pada baris s0 : K > 0 9 K 7 27 >K 9 14 >K 9
2>
dua syarat ini harus dipenuhi secara bersamaan. Bila keduanya digabungkan akan diperoleh 14 >K>0 9 atau 0<K< 14 . 9
Syarat di atas menunjukkan rentang nilai K yang membuat sistem masih tetap stabil, karena syarat tersebut menjamin tidak akan terjadi perubahan tanda pada kolom pertama matrikulasi koesien Routh. Di luar rentang ini sistem akan mempunyai kutup di sebelah kanan (daerah takstabil) dan sistem berosilasi dan kemudian menjadi tak-stabil. Pada nilai K =
14 , 9
(secara matematis) sistem akan berosilasi dengan amplitodo
yang tetap karena kolom pertama baris s1 mempunyai nilai nol (bukan positip dan bukan pula negatip).
M. Dhandhang P. Dasar-2 T. Pengaturan (Rev. Juli 2002)
61
Analisis Tempat Kedudukan Akar
Pada bagian ini akan dijelaskan tentang suatu metode yang dikembangkan
oleh W. R. Evans yang dapat membantu untuk menganalisis sistem dalam perancangannya. Metode tersebut dinamakan Analisis tempat kedudukan akar (Root-Locus Analysis). Teknik analisis tempat kedudukan akar ini memungkinkan kita untuk menghitung respons domain-waktu dengan lebih akurat dan dapat menghasilkan informasi tentang respons frekuensi secara langsung.
Gambar 18: Diagram blok suatu sistem untai tertutup
Untuk memahami fungsi dan kegunaan metode analisis tempat kedudukan akar, sebaiknya dimulai dengan suatu sistem untai tertutup tipikal yang digambarkan dengan diagram blok seperti yang terlihat pada Gambar 18 hal.61. Fungsi alih untai tertutup dari gambar tersebut adalah: C(s) G1 (s) = R(s) 1 + G1 (s)H(s) (76)
Fungsi alih untai terbuka G1 (s)H(s) (lihat persamaan (25) hal.29) dapat ditulis sebagai G1 (s)H(s) = K G(s) = K B(s) K(b0 sm + b1 sm1 + . . . + bm1 s + bm ) = A(s) a0 sn + a1 sn1 + . . . + an1 s + an (77)
K adalah faktor perolehan (gain factor) untai terbuka. Dengan berdasarkan
M. Dhandhang P. Dasar-2 T. Pengaturan (Rev. Juli 2002)
62
pada persamaan ini fungsi alih untai tertutup di atas dapat ditulis kembali sebagai
G1 (s)A(s) C(s) G1 (s) G1 (s) G1 (s) = = = = B(s) R(s) 1 + G1 (s)H(s) 1 + K G(s) A(s) + K B(s) 1 + K A(s) (78)
dan persamaan karakteristik untuk fungsi alih untai tertutup ini dapat ditulis dalam berbagai bentuk (semua persamaan ini mempunyai nilai dan arti yang sama) sebagai berikut 1 + K G(s) = 0 1+K B(s) =0 A(s) 1 K (79) (80) (81) (82)
A(s) + K B(s) = 0 G(s) =
Dari persamaan karakteristik ini jelas bahwa nilai kutup-kutup dari fungsi alih sistem untai tertutup di atas (persamaan (76) ) tergantung pada nilai K. Seperti telah diuraikan dalam contoh penggunaan kriteria Routh pada bagian sebelumnya yaitu dalam kasus stabilitas bersyarat, bahwa terdapat rentang nilai K tertentu yang akan menjadikan sistem dalam kondisi tetap stabil. Kasus tersebut menunjukkan bahwa nilai K akan mempengaruhi stabilitas. Hal yang sama terjadi pula pada sistem Gambar 18 hal.61. Karena akar-akar persamaan karakteristik ( persamaan (79) (82) ) akan berubah dengan bervariasinya nilai K, maka Evans menyarankan kepada perancang sistem agar menggambar tempat-tempat kedudukan akar yang mungkin pada saat K bervariasi dari 0 hingga . Dengan cara ini diharapkan perancang secara gras akan dapat menentukan rentang harga K yang tepat agar sistem tetap berfungsi dengan baik tanpa resiko adanya ketidakstabilan yang timbul kemudian dalam unjuk kerjanya karena berubahnya nilai K.
M. Dhandhang P. Dasar-2 T. Pengaturan (Rev. Juli 2002)
63
Dalam analisis tempat kedudukan akar, kita tidak perlu melakukan faktorisasi terhadap persamaan karakteristik dari fungsi alih untai tertutup (1 + K G(s) = 0) untuk dapat menyelesaikan persoalan stabilitas. Yang diperlukan dalam analisis tempat kedudukan akar adalah kutup atau zero dari G(s) = saja, bukan kutup dan zero dari fungsi alih untai tertutup
C(s) R(s) B(s) A(s)
G1 , [1+K G(s)]
karena sebenarnya kutup dan zero dari G(s) semuanya adalah kutup-kutup dari
C(s) R(s)
yang tempat kedudukannya di dalam koordinat kompleks mempun-
yai arti dalam hal stabilitas sistem untai tertutup secara keseluruhan.
6.1
Tempat kedudukan akar
Sebelum memulai pembahasan lebih lanjut, sebaiknya kita simak dan
fahami dahulu dua denisi yang sangat mendasar sehubungan dengan teknik analisis tempat kedudukan akar. Tempat Kedudukan Akar: adalah tempat kedudukan dari semua nilai s yang dapat memenuhi persamaan karakteristik 1 + KG(s) = 0 dengan parameter riil K berubah dari 0 . Karena 1 + KG(s) = 0 adalah penyebut dari fungsi alih untai tertutup suatu sistem yang ditinjau, maka akar-akar pada tempat kedudukan tersebut merupakan kutup sistem untai tertutup.
1 Bila persamaan karakteristik 1 + KG(s) = 0 diubah menjadi G(s) = K ,
untuk K bernilai riil postip maka pasti G(s) akan bernilai riil negatip. Dengan kata lain, bila G(s) dinyatakan dalam bentuk polar yaitu dengan ekspresi Besar dan Sudut, maka agar 1 + KG(s) = 0 terpenuhi, maka K dalam bentuk polar haruslah mempunyai sudut fase yang berlawanan (kedua sudut fase akan membentuk sudut 180 ). Dari kenyataan ini dapat didenisikan:
M. Dhandhang P. Dasar-2 T. Pengaturan (Rev. Juli 2002)
64
Tempat Kedudukan Akar dari G(s): adalah tempat kedudukan titiktitik dalam bidang kompleks yang mempunyai sudut fase dari G(s) sebesar 180 (G = 180 ). Karena penambahan suatu sudut fase dengan kelipatan 360 tidak akan mengubah sudut itu sendiri, maka dapat didenisikan: G = 180 = 180 (n 360 ) G = 180 n360 (83)
Untuk memperjelas pemahaman terhadap persamaan (83), berikut ini akan diberikan contoh yang cukup memadai. Misalnya terdapat fungsi alih untai tertutup dari suatu sistem sebagai berikut. C(s) G1 (s) = R(s) 1 + KG(s) dengan G(s) adalah: G(s) = s+1 s [((s + 2)2 + 4) (s + 5)] (85) (84)
Persamaan (85) mempunyai satu zero yaitu {1}, dan 4 kutup yaitu {0, 2 + j2, 2 j2, 5}. Tempat kedudukan zero dan kutup-kutup tersebut dapat dilihat pada Gambar 19 hal.65. Pada Gambar 19, tempat kedudukan zero diberi tanda dan tempat kedudukan kutup diberi tanda . Pada gambar tersebut jelas semua kutup dan zero pasti memenuhi persamaan karakteristik, karena kutup dan zero tersebut diperoleh dengan cara menyelesaikan persamaan G(s) = 0. Yang menjadi masalah kita adalah mencari letak titik-titik, selain kutup dan zero yang telah digambarkan, yang merupakan tempat kedudukan kutup (tempat kedudukan akar) bila terdapat perubahan nilai K yang menyebabkan kedudukan kutup aslinya berubah. Untuk maksud itu, marilah kita selidiki
M. Dhandhang P. Dasar-2 T. Pengaturan (Rev. Juli 2002)
65
Gambar 19: Tempat kedudukan zero dan kutup dari persamaan (85)
apakah titik s0 = 1+j2 merupakan tempat kedudukan akar (dapat berarti tempat kedudukan kutup) dari persamaan karakteristik atau tidak. Bila himpunan tempat kedudukan akar (kutup dan zero) dari G(s) dapat kita ketahui semuanya, maka masalah stabilitas sistem (apakah kutup fungsi alih untai tertutup berada pada daerah stabil atau tak-stabil) dapat diselidiki, terutama bila terdapat parameter K yang berubah dari 0 . Untuk menyelidiki apakah titik s0 merupakan tempat kedudukan akar atau tidak, pertama perlu dilakukan pengecekan sudut fasa, yaitu
M. Dhandhang P. Dasar-2 T. Pengaturan (Rev. Juli 2002)
66
dengan menarik garis dari s0 ke semua akar (zero dan kutup) seperti terlihat pada Gambar 19. Kemudian dari setiap akar dihitung sudutnya, yaitu sudut antara garis horisontal yang melalui akar dan garis yang menghubungkan akar tersebut dengan titik s0 . Dari perhitungan sudut ini diperoleh: zero kutup kutup kutup kutup z1 = 1 p1 = 0 p2 = 2 + j2 p3 = 2 j2 p4 = 5 1 = 90 1 = 116.6 2 = 0 3 = 76 4 = 26.6
Sudut fase dari G(s) dapat diperoleh dengan persamaan berikut.
G = (jumlah sudut fase semua zero) (jumlah sudut fase semua kutup) (86)
Jadi untuk titik s0 = 1 + j2, sudut fase G(s): G = 90 (116.6 + 0 + 76 + 26.6 ) = 129.2 Karena G tidak sama dengan 180 , maka titik s0 bukan tempat kedudukan akar. Dari contoh ini, dapat disimpulkan bahwa adalah tidak mudah untuk mencari-cari himpunan titik tempat kedudukan akar dengan metode coba-coba seperti yang telah kita lakukan pada contoh di atas. Karena itu, pada bagian berikutnya akan dibahas mengenai cara menggambar tempat kedudukan akar.
6.2
Cara menggambar tempat kedudukan akar
Pada penjelasan di atas telah dikemukakan pengertian dan sifat dari tem-
pat kedudukan akar. Pada bagian ini akan dikemukakan langkah-langkah untuk menggambarkan tempat kedudukan akar pada koordinat kompleks untuk menyelidiki stabilitas sistem sehubungan terdapatnya perubahan parameter K
M. Dhandhang P. Dasar-2 T. Pengaturan (Rev. Juli 2002)
67
(gain factor atau faktor perolehan). Untuk mendemonstrasikan bagaimana langkah-langkah menggambar diagram tempat kedudukan akar digunakan contoh fungsi alih untai tertutup dengan persamaan karakteristiknya adalah 1 + K G(s) = 0 dengan G(s)-nya adalah sebagai berikut G(s) = 1 1 = 2 + 16] 2 + 8s + 32) s [(s + 4) s(s (88) (87)
kutup dari G(s) (G(s) tidak mempunyai zero) dapat diperoleh dengan persamaan berikut s(s2 + 8s + 32) = 0 s [s (4 + j4)] [s (4 j4)] = 0 Langkah-langkah menggambar diagram tempat kedudukan akar adalah sebagai berikut: 1. Gambarkan koordinat kompleks dengan skala yang memadai dan jelas, kemudian berikan tanda untuk zero dan untuk kutup. Pada contoh persamaan (88), dari persamaan karakteristiknya diperoleh 3 buah kutup {0, (4 + j4), (4 j4)}. Bila kutup-kutup tersebut digambarkan akan diperoleh gambar seperti terlihat pada Gambar 20 sebelah kiri. 2. Tentukan bagian/segmen garis sumbu Re(s) yang merupakan tempat kedudukan akar. Pada Gambar 20 sebelah kiri, terlihat bahwa dengan adanya satu kutup pada sumbu Re(s), sumbu tersebut terbagi atas dua bagian/segmen yaitu sebelah kiri kutup dan sebelah kanan kutup. Bila kita letakkan titi uji s0 di sebelah kanan kutup, seperti terlihat
M. Dhandhang P. Dasar-2 T. Pengaturan (Rev. Juli 2002)
68
Gambar 20: Langkah ke-1 dan ke-2 menggambar tempat kedudukan akar
pada Gambar 20 sebelah kanan, maka dapat ditentukan sudut fase dari masing-masing kutup yaitu 1 , 2 dan 3 . Seperti persamaan (86), G dapat dihitung sebagai berikut G = zero (1 + 2 + 3 ) = 0 (1 + 2 + 3 ) (89)
dari Gambar 20 hal.68 sebelah kanan, terlihat bahwa besar sudut 1 dan 2 sama, tetapi mempunyai arah (tanda) yang berbeda, karena itu dalam persamaan (89) 1 dan 2 akan saling menghilangkan (1 + 2 = 0). Dengan demikian nilai G hanya tergantung pada nilai dari 3 . Kenyataanya 3 = 0 (6= 180 ), karena itu s0 bukan tempat kedudukan akar, demikian pula untuk semua titik-titik disebelah kanan kutup 0 akan menghasilkan 3 = 0 , karena itu dapat disimpulkan bahwa segmen garis disebelah kanan kutup 0 pada sumbu Re bukan tempat ke-
M. Dhandhang P. Dasar-2 T. Pengaturan (Rev. Juli 2002)
69
dudukan akar. Lain halnya bila kita letakkan titik uji s0 disebelah kiri kutup 0. Hal ini akan menghasilkan 3 = 180 . Dengan demikian segmen garis di sebelah kiri kutup 0 adalah tempat kedudukan akar pada sumbu riil dan pada Gambar 20 hal.68 sebelah kanan tempat kedudukan akar tersebut digambarkan dengan garis tebal 3. Gambarkan garis-garis asimptot. Garis asimptot adalah garis yang keluar dari suatu titik (sebut saja dengan nama titik ) ke arah radial dengan sudut fase ` . Seperti dijelakan pada bagian-bagian sebelumnya (persamaan (8) hal.14 dan persamaan (23) hal.22), pada umumnya G(s) dapat dinyatakan sebagai G(s) = b0 sm + b1 sm1 + . . . + bm1 s + bm B(s) = A(s) a0 sn + a1 sn1 + . . . + an1 s + an K(s + z1 )(s + z2 ) . . . (s + zm ) = (m < n) (s + p1 )(s + p2 ) . . . (s + pn ) (90) (91)
Pada persamaan G(s) ini akan terdapat (nm) buah garis asimptot yang keluar (secara radial) dari suatu titik . Garis-garis asimptot tersebut akan mempunyai sudut fasa di titik sebagai berikut ` = 180 + `360 nm ` = 0, 1, 2, . . . , (n m 1). (92)
Pada contoh persamaan (88) hal.67 yang dipakai untuk menjelaskan cara menggambar tempat kedudukan akar diperoleh n m = 3 0 = 3, dan sudut-sudut fase asimptotnya 180 + 0 360 180 = = 60 , 30 3 180 + 1 360 180 + 360 1 = = = 180 , 30 3 180 + 2 360 180 + 720 2 = = = 300. 30 3 0 =
M. Dhandhang P. Dasar-2 T. Pengaturan (Rev. Juli 2002)
70
Walaupun demikian kita belum dapat menggambar garis-garis asimptotnya kalau posisi titik belum diketahui. Posisi titik dapat ditentukan dengan persamaan berikut =
P P
pi zi , nm
(93)
dengan pi dan zi , masing-masing adalah kutup dan zero ke-i. Dengan persamaan (93) untuk contoh soal yang kita bahas, dapat diperoleh nilai sebagai berikut = 4 4 8 {(4 + j4) + (4 j4) + 0} {0} = = = 2.67 30 3 3
Bila garis-garis asimptot kita gambar, maka dari titik 2.67 dapat di-
Gambar 21: Langkah ke-3 dan ke-4 menggambar tempat kedudukan akar
tarik 3 buah garis ke arah menjauhi titik 2.67 dan masing-masing garis membentuk sudut 60 , 180 , 300 dengan garis horisontal yang melalui titik 2.67. Garis kedua dengan sudut 180 akan sejajar dengan sumbu
M. Dhandhang P. Dasar-2 T. Pengaturan (Rev. Juli 2002)
71
Re negatip. Dua garis asimptot yang lain akan memotong sumbu Im pada titik +j4.62 dan j4.62. Garis-garis asimptot tersebut dapat dilihat pada Gambar 21 hal.70 sebelah kiri. 4. Hitung sudut pergi dan sudut datang. Garis yang menggambarkan himpunan titik-titik akar (tempat kedudukan akar), sehubungan dengan perubahan nilai K dari 0 ke , akan bergerak dan berangkat dari titik-titik kutup G(s) (ditandai dengan ) menuju titik zero (ditandai dengan ) atau keluar menuju dengan menyusuri garis asimptot tanpa memotong garis tersebut (mengikuti garis secara asimptotis). Untuk dapat menggambar garis tempat kedudukan akar, diperlukan pengetahuan tentang sudut pergi (meninggalkan kutup) dan sudut datang (menuju zero atau titik ). Berikut ini akan dijelaskan cara untuk menghitung sudutsudut tersebut. Pertama kita akan menghitung sudut pergi pada 2 , Untuk menghitung sudut pergi pada kutup ini dapat dilakukan dengan meletakkan suatu titik uji s0 yang dekat dengan titik kutupnya sehingga bila titik uji ini digerakkan memutari titik kutup, maka sudut yang lainnya (1 dan 3 ) dapat dianggap tidak berubah (lihat Gambar 21 sebelah kanan pada hal.70). Dengan perhitungan geometri yang tidak sulit dapat diperoleh: 1 = 90 dan 3 = 135
Dengan kaidah, persamaan (83) hal.64dapat dihitung 2 sebagai berikut 0 (90 2 135 ) = 180 n360 dengan mengambil nilai n = 1, maka sudut pergi (berangkat) pada kutup
M. Dhandhang P. Dasar-2 T. Pengaturan (Rev. Juli 2002)
72
4 + j4 adalah 2 = 90 + 135 + 180 360 2 = 45 Karena 1 adalah konjugate simetris dari 2 , maka sudut pergi pada kutup 4 j4 adalah 1 = +45 dengan mudah dapat ditentukan. Sudut pergi untuk 3 adalah 3 = 180 karena garis asimptot berada disebelah kiri titik kutup ini, jadi untuk mengikuti garis ini menunuju hanya terdapat satu kemungkinan sudut pergi yaitu 180 . Pada contoh ini tidak terdapat zero sehingga tidak ada demonstrasi contoh menghitung sudut datang ke zero. Tetapi cara yang sama untuk mendapatkan sudut pergi dapat juga digunakan untuk menghitung sudut datang ke titik zero. 5. Hitung titik potong tempat kedudukan akar dengan sumbu imaginer, Im. Telah dijelaskan di depan bahwa, bila terdapat satu atau lebih akar persamaan karakteristik dari suatu sistem (kutup) yang berada disebelah kanan sumbu Im, maka sistem tersebut pasti tak-stabil. Telah pula diberikan contoh bagaimana menghitung batas-batas stabilitas karena adanya perubahan parameter K dengan menggunakan kriteria stabilitas Routh dalam kasus stablitas bersyarat. Pengetahuan-pengetahuan ini dapat digunakan untuk menghitung titik potong tempat kedudukan akar terhadap sumbu Im, mengingat pada titik potong ini terdapat informasi batas-batas kesetabilan sistem. Untuk menghitung titik potong
M. Dhandhang P. Dasar-2 T. Pengaturan (Rev. Juli 2002)
73
tempat kedudukan akar dengan sumbu Im, pertama kita anggap terdapat parameter K sedemikian rupa sehingga dengan tidak mengubah penyelesaian, persamaan karakeristik dari contoh soal yang kita gunakan dapat ditulis sebagai berikut: (lihat persamaan (87) hal.67) 1+ K =0 s[(s + 4)2 + 16] (94)
atau dapat pula ditulis dalam bentuk sebagai berikut s3 + 8 s2 + 32 s + K = 0 matrikulasi koesien Routh untuk persamaan di atas adalah: (95)
s3 s s
2
: : : :
1 8
256K 8
32 K
s1
0
dari matrikulasi di atas diperoleh syarat agar sistem tetap stabil sebagai berikut 0 < K < 256 Bila K > 256, maka akan terdapat perubahan tanda dua kali pada kolom pertama matrikulasi, berarti akan terdapat dua kutup di sebelah kanan (daerah tak-stabil) dalam koordinat kompleks. Jika K < 256 semua akar akan berada di sebelah kiri (daerah stabil) dalam koordinat kompleks. Jadi dapat disimpulkan bahwa titik potong tempat kedudukan akar dan sumbu imaginer terjadi pada saat K = 256. Dengan mensubtitusikan nilai K ke dalam persamaan karakteristiknya (persamaan (95)) diperoleh s3 + 8 s2 + 32 s + 256 = 0 (96)
M. Dhandhang P. Dasar-2 T. Pengaturan (Rev. Juli 2002)
74
Perlu diketahui bahwa pada persamaan ini, penyelesaian s pada K = 256 harus teletak pada sumbu Im, karena itu komponen riil-nya nol. Atau dengan kata lain s = j0 dengan 0 adalah titik potong tersebut. Persamaan di atas dapat ditulis lagi menjadi (j0 )3 + 8 (j0 )2 + 32 (j0 ) + 256 = 0 (97)
Bila persamaan ini benar, maka bagian riil dan imaginer harus sama dengan nol, dengan demikian diperoleh
2 8 (j0 )2 + 256 = 80 + 256 = 0 (Riil) 3 (j0 )3 + 32 (j0 ) = j(0 + 320 ) = 0 (Imaginer)
atau dapat ditulis menjadi bentuk:
2 80 + 256 = 0)
3 0 + 320 = 0
2 0 + 32 = 0 0 = 32
dari persamaan ini akan diperoleh titik potong tempat kedudukan akar dengan sumbu imaginer, yaitu 0 = 32 = 5.66. Segala informasi yang telah kita peroleh; 3 titik kutup, titik , 3 garis asimptot, sudut pergi dari 3 kutup, titik potong tempat kedudukan akar dengan sumbu imaginer, digambar dalam Gambar 22 hal.75. 6. Menentukan lokasi dari akar-akar bertumpuk, terutama yang terletak pada sumbu riil (untuk menghitung sudut pisah dan/atau sudut gabung), dan menghitung sudut pergi dan datang pada akar tersebut. Bila persamaan karakteristik mempunyai orde tinggi (lebih dari satu), maka sangat mungkin akan mempunyai akar ganda yang bertumpuk. Bila akar ganda yang saling tumpang tindih ini berada di sumbu riil, maka
M. Dhandhang P. Dasar-2 T. Pengaturan (Rev. Juli 2002)
75
Gambar 22: Langkah 15 menggambar tempat kedudukan akar
pada titik pertemuan antara akar-akar tersebut akan terdapat pertemuan (breakin) tempat kedudukan akar dan perpisahan (breakway). Pada titik pertemuan dan perpisahan ini faktor perolehan K akan mempunyai nilai maksimumnya, karena itu bila titik pertemuan ini dinamakan s0 , maka berlaku persamaan berikut ini.
d K ds
d 1 ds G(s)
=0 =
(98) d 1 B(s) ds A(s)
s=s0
s=s0
s=s0
d A(s) ds B(s)
s=s0
=0 (99)
A(s) d ds B(s)
1 dA(s) dB(s) = B(s) A(s) [B(s)]2 ds ds
= 0 (100)
Penerapan kaidah ini untuk contoh persoalan kita ( persamaan (88)
M. Dhandhang P. Dasar-2 T. Pengaturan (Rev. Juli 2002)
76
hal.67) adalah: B(s) = 1, A(s) = s3 + 8s2 + 32s, d B(s) = 0 ds d B(s) = 3s2 + 16s + 32 ds
(101)
subtitusikan hasil ini ke persamaan (100) diperoleh 3s2 + 16s + 32 = 0 s0 = 2.67 j1.89 Dari Gambar 22 hal.75 terlihat bahwa titik uji s0 tidak terletak pada tempat kedudukan akar. Terlihat bahwa kaidah yang kita gunakan hanya mampu menunjukkan titik tempat akar ganda yang terletak pada tempat kedudukan akar. Kaidah ini sangat penting dan berguna tetapi tidak cukup untuk menghitung sudut perpisahan dan pertemuan. Untuk menghitung kedua sudut ini dapat digunakan kaidah sudut-sudut yang memenuhi kaidah tempat kedudukan akar pada langkah ke-4. 7. Menggambar seluruh tempat kedudukan akar dengan data yang telah diperoleh. Dari langkah 16 telah kita peroleh data yang cukup untuk menggambar tempat kedudukan akar secara lengkap dan gambar tersebut dituangkan dalam Gambar 23 hal.77. Pada gambar tersebut terlihat bahwa himpunan titik-titik akar dari persamaan karakeristik bila K bergerak dari 0 (tempat kedudukan akar) digambar dengan garis tebal. Garis tersebut bergerak dari kutup menuju dengan arah menyinggung garis asimptot. Karena pada contoh ini tidak ada zero, maka tidak ada garis tempat kedudukan akar yang menuju zero. Dari uraian tentang cara menggambar tempat kedudukan akar,dapat disimpulkan secara ringkas sebagai berikut: (102)
M. Dhandhang P. Dasar-2 T. Pengaturan (Rev. Juli 2002)
77
Gambar 23: Gambar lengkap tempat kedudukan akar
1. Tentukan kutup dan zero dari persamaan karakteristik suatu fungsi alih sistem yang dianalisis (1 + KG(s) = 0) KG(s) = K(b0 sm + b1 sm1 + . . . + bm1 s + bm ) , a0 sn + a1 sn1 + . . . + an1 s + an
kemudian gambar titik tersebut dengan dan , masing-masing untuk kutup dan zero. 2. Tentukan bagian dari sumbu riil yang merupakan bagian dari tempat kedudukan akar. 3. Gambar (n m) buah garis asimptot yang berpusat di titik dan mem-
M. Dhandhang P. Dasar-2 T. Pengaturan (Rev. Juli 2002)
78
bentuk sudut fase ` , sebagai berikut: pi i zi nm 180 + n360 ` = nm =
i
` =, 0, 1, 2, . . . , (n m 1).
4. Hitung sudut pergi dari kutup dan sudut datang ke zero. 5. Tentukan titik potong tempat kedudukan akar dengan sumbu imaginer untuk nilai K yang positip. 6. Persamaan akan mempunyai akar ganda yang bertumpuk pada tempat kedudukan akar yaitu bila b dB(s) dA(s) a =0 ds ds
Hitung sudut pergi dan sudut datang untuk akar-akar tersebut. Jika s0 berada pada sumbu riil, maka akan terdapat sudut pisah dan sudut gabung pada akar ganda tersebut. 7. Gambar tempat kedudukan akar secara lengkap dari data yang diperoleh pada langkah-langkah sebelumnya.
M. Dhandhang P. Dasar-2 T. Pengaturan (Rev. Juli 2002)
79
Daftar Pustaka
[1] Ogata K., Modern Control Engineering, 2nd ed. Prentice Hall, New Jersey (1990). [2] Franklin, G.F., Powell, J.D.,Emami-Naeni, A., Feedback Control of Dynamic Systems, Addison-Wesley, Massachusetts (1986). [3] DiStefano III,J.J, Stubberud,A.R., Williams,I.J., Feedback and Control Systemss, Schaums Outline Series, McGraw-Hill International, Singapore (1983).
You might also like
- Sistem PengaturanDocument21 pagesSistem PengaturanNoctradamus100% (1)
- Pengantar Teknik PengaturanDocument46 pagesPengantar Teknik PengaturanBoodee PrayNo ratings yet
- Redesaign Mesin Pengupas Kulit KopiDocument73 pagesRedesaign Mesin Pengupas Kulit Kopijunaidi100% (1)
- TEKNIK PENGATURAN LAPLACE DAN FUNGSI ALIHDocument45 pagesTEKNIK PENGATURAN LAPLACE DAN FUNGSI ALIHDanilAnshelmusPurbaNo ratings yet
- Sistem Kendali Loop TertutupDocument11 pagesSistem Kendali Loop Tertutupbudi_prayogo9485No ratings yet
- Bukumekatronik Edisi2Document150 pagesBukumekatronik Edisi2John RamboNo ratings yet
- Modul Prak. RobotikaDocument39 pagesModul Prak. RobotikaZchabar Jhie100% (2)
- Laporan Fenomena Dasar - GovernorDocument29 pagesLaporan Fenomena Dasar - GovernorRenhard Gultom50% (2)
- Pneumatik Pertemuan 1Document47 pagesPneumatik Pertemuan 1Adam brzNo ratings yet
- Tugas Pengaturan TeknikDocument22 pagesTugas Pengaturan TekniktyooabdiNo ratings yet
- LQR DCDocument10 pagesLQR DCMohammad ShofwanNo ratings yet
- GOVERNORDocument7 pagesGOVERNORadiNo ratings yet
- Laporan Praktikum Sistem FuzzyDocument19 pagesLaporan Praktikum Sistem FuzzyYolandariNo ratings yet
- Dasar Dasar MekatronikaDocument15 pagesDasar Dasar MekatronikaJunion GultomNo ratings yet
- Materi Kuliah Teknik Pengaturan2Document10 pagesMateri Kuliah Teknik Pengaturan2Tawara TodaNo ratings yet
- Tugas Praktikum CNCDocument89 pagesTugas Praktikum CNCRoniNo ratings yet
- Dasar Teori Sistem KendaliDocument42 pagesDasar Teori Sistem KendaliKhana Eland Novana AtmajaNo ratings yet
- Laporan Tugas Akhir Agus Triyatno (07508134044)Document90 pagesLaporan Tugas Akhir Agus Triyatno (07508134044)Intan R SembiringNo ratings yet
- Purwantono Buku Sistem HidrolikDocument20 pagesPurwantono Buku Sistem HidrolikSyafiqatul Fuady100% (1)
- Analisis Electrostatic Precipitator (Esp) Untuk Penurunan Emisi Gas Buang Pada Recovery Boiler Sepfitrah, Yose Rizal AbstrakDocument12 pagesAnalisis Electrostatic Precipitator (Esp) Untuk Penurunan Emisi Gas Buang Pada Recovery Boiler Sepfitrah, Yose Rizal Abstrakrudhyk24No ratings yet
- Skripsi Modul Rancang Bangun Mesin Pengampelas KayuDocument77 pagesSkripsi Modul Rancang Bangun Mesin Pengampelas KayuMas Ripan40% (5)
- Dasar-Dasar Motor BensinDocument131 pagesDasar-Dasar Motor BensinRyan Bagas WicaksonoNo ratings yet
- Bab2 Istilah Pengendalian - 2Document13 pagesBab2 Istilah Pengendalian - 2Robai RobertNo ratings yet
- Diagram Blok Sistem KontrolDocument5 pagesDiagram Blok Sistem KontrolFadil Rizki MNo ratings yet
- Prinsip KerjaDocument7 pagesPrinsip KerjaHandoko Go GreensNo ratings yet
- Penggerak HidrolikDocument38 pagesPenggerak HidrolikbaghostNo ratings yet
- Buku Ajar Pneumatik & Hidrolik 2021Document65 pagesBuku Ajar Pneumatik & Hidrolik 2021kevin divaryaNo ratings yet
- MEKATRONIKA DAN ROBOTIKDocument14 pagesMEKATRONIKA DAN ROBOTIKHAIRULNo ratings yet
- Rancangan Turbin Air Cross FlowDocument30 pagesRancangan Turbin Air Cross FlowjossygmmNo ratings yet
- CADDocument40 pagesCADrhiezkhaiNo ratings yet
- RANCANG BANGUN MESIN PENCACAH SAMPAH PLASTIKDocument5 pagesRANCANG BANGUN MESIN PENCACAH SAMPAH PLASTIKGorby Jonatan SinagaNo ratings yet
- Makalah Praktikum Peraga GovernorDocument17 pagesMakalah Praktikum Peraga GovernorRudini MulyaNo ratings yet
- Laporan PRAKTIKUM PRESTASI MESINDocument30 pagesLaporan PRAKTIKUM PRESTASI MESINbimbi sinagaNo ratings yet
- Getaran BebasDocument34 pagesGetaran BebasRenhard Gultom75% (4)
- Makalah Turbin AirDocument18 pagesMakalah Turbin AirYudi Novice Fase86% (7)
- Laporan-PLTMH-Bab 2-3Document18 pagesLaporan-PLTMH-Bab 2-3fajarNo ratings yet
- Transformasi ZDocument6 pagesTransformasi ZBanserSahara0% (1)
- SISTEM PNEUMATIKDocument9 pagesSISTEM PNEUMATIKFahmi AlwiNo ratings yet
- MikrokontrolerDocument9 pagesMikrokontrolerMuh Nur Fatahillah100% (1)
- SKMDocument128 pagesSKMSinggih AgustianNo ratings yet
- 21 778 MainaDocument119 pages21 778 Mainalance1894No ratings yet
- Arya Lasmana SaputraDocument14 pagesArya Lasmana SaputraArya Lasmana SaputraNo ratings yet
- Cover N 1 Matriks PDFDocument25 pagesCover N 1 Matriks PDFDe PeNo ratings yet
- PDB Prof - DafixDocument128 pagesPDB Prof - DafixHesti A. Priejanto100% (1)
- Eniman Y. Syamsuddin, Aciek Ida W. D. - Buku Pegangan Kuliah Sistem KendaliDocument288 pagesEniman Y. Syamsuddin, Aciek Ida W. D. - Buku Pegangan Kuliah Sistem Kendaliandy_ipul100% (2)
- Full Pneumatic 2Document62 pagesFull Pneumatic 2murastria98% (42)
- Bahan Ajar ALEDocument98 pagesBahan Ajar ALEIsmail Husein Al AsyariNo ratings yet
- GEOFISIKADocument39 pagesGEOFISIKAFelixius Rian Dwi WijayantoNo ratings yet
- Analisis Data GeofisikaDocument53 pagesAnalisis Data GeofisikaqbiraxNo ratings yet
- Analisis Data GeofisikaDocument56 pagesAnalisis Data GeofisikaArif Rahman BoleNo ratings yet
- Timeseries AnalysisDocument66 pagesTimeseries AnalysisMuhammad Arif DarmawanNo ratings yet
- Catatan Kuliah Matematika IIADocument88 pagesCatatan Kuliah Matematika IIADinda Ayu Sagita0% (1)
- Eigko - Dasar Dasar Getaran Mekanis Autosaved PDFDocument150 pagesEigko - Dasar Dasar Getaran Mekanis Autosaved PDFEigko Malau0% (1)
- PROPOSAL SKRIPSI Ardo Faiq Arkan 202111148Document33 pagesPROPOSAL SKRIPSI Ardo Faiq Arkan 202111148Yunan RamadhanNo ratings yet
- 1113-Article Text-5200-1-10-20210816Document159 pages1113-Article Text-5200-1-10-20210816Hasinah AliNo ratings yet
- PRAKTIKUM FixDocument43 pagesPRAKTIKUM FixFery Prima PraharaNo ratings yet
- #Modul Komputasi GeofisikaDocument94 pages#Modul Komputasi Geofisikamona sihombingNo ratings yet
- Bahan Matematika ODEDocument179 pagesBahan Matematika ODEDJoko PrasetioNo ratings yet
- SPL SolusiDocument138 pagesSPL SolusiOyaaaNo ratings yet
- 1 001-BukusiskontrolDocument255 pages1 001-BukusiskontrolAzhar RitongaNo ratings yet