You might also like
- Rekayasa Pondasi 2Document221 pagesRekayasa Pondasi 2Angela Amadea RajagukgukNo ratings yet
- Ganesha Sakti Anggara Bangun Analisa Struktur 3 Quiz 4Document2 pagesGanesha Sakti Anggara Bangun Analisa Struktur 3 Quiz 4RISCA BELLA NOPRYANINo ratings yet
- Tugas Mekanika TanahDocument4 pagesTugas Mekanika TanahAdityo Bambang WNo ratings yet
- DESAIN BENDUNGDocument12 pagesDESAIN BENDUNGMuhammad Dian Pratama100% (1)
- Elemen Mesin (Pegas)Document25 pagesElemen Mesin (Pegas)Wahyu Kurniawan81% (16)
- Nyimas Tazkiah M (41118120055) TM 11 PDFDocument4 pagesNyimas Tazkiah M (41118120055) TM 11 PDFNYIMAS TAZKIAH M100% (2)
- TB 2Document3 pagesTB 2Septi MutNo ratings yet
- REAKSIGRAFISDocument4 pagesREAKSIGRAFISWakhid FakhrurojiNo ratings yet
- MODUL Anstruk II-3 Dishub ProblematikDocument27 pagesMODUL Anstruk II-3 Dishub ProblematikRyan AdityaNo ratings yet
- Mekanika Bahan-Modul 8Document23 pagesMekanika Bahan-Modul 8Yovic SyibralNo ratings yet
- Metode NumerikDocument4 pagesMetode NumerikAnder HiaNo ratings yet
- MEKREK 3 4 Consisten DeformationDocument22 pagesMEKREK 3 4 Consisten DeformationDedy Ismail HartonoNo ratings yet
- Dinamika Struktur 2222Document48 pagesDinamika Struktur 2222Nurul Hasanah ArwiiNo ratings yet
- MTK 3 Teknik SipilDocument32 pagesMTK 3 Teknik SipilGITANo ratings yet
- Modul 13Document10 pagesModul 13Danya23No ratings yet
- PERC 2 Aliran Melalui Peluap Segitiga AccDocument14 pagesPERC 2 Aliran Melalui Peluap Segitiga Accmuhammad amirNo ratings yet
- JUDULDocument19 pagesJUDULNawan Ardiant100% (1)
- Analisis Struktur Statis Tak Tentu Dengan Metode Slope-DeflectionDocument41 pagesAnalisis Struktur Statis Tak Tentu Dengan Metode Slope-DeflectionMuhammad ShidiqNo ratings yet
- Dasar Teori Momen KurvaturDocument8 pagesDasar Teori Momen KurvaturSobah As-sidqiNo ratings yet
- Susunan TiangDocument16 pagesSusunan TiangSiti arinda aprilianiNo ratings yet
- Modul 9Document11 pagesModul 9Putu Roby Adhitya SapancaNo ratings yet
- Contoh Perancangan Struktur (Kolom)Document17 pagesContoh Perancangan Struktur (Kolom)Thozima SLazher JuNtakNo ratings yet
- Uts Struktur Baja IIDocument3 pagesUts Struktur Baja IIIrdhanNo ratings yet
- Bab. V Daya Dukung Pondasi Tiang - 040820Document47 pagesBab. V Daya Dukung Pondasi Tiang - 040820Desma SamosirNo ratings yet
- UTS Struktur Beton 1Document6 pagesUTS Struktur Beton 1gerald jordanNo ratings yet
- Tugas Metode NumerikDocument5 pagesTugas Metode NumerikArtya Aurelia PramesthiNo ratings yet
- PortalDocument16 pagesPortalNano PrivatNo ratings yet
- Metode Momen DistribusiDocument11 pagesMetode Momen Distribusisapti martaliaNo ratings yet
- Makalah 3 Portal 3 SendiDocument16 pagesMakalah 3 Portal 3 SendiApri RantoNo ratings yet
- Metode Momen Distribusi (Pada Balok)Document18 pagesMetode Momen Distribusi (Pada Balok)Muh Sugandi Gani100% (1)
- Metode NumerikDocument13 pagesMetode NumerikM Farid Alfarizi RNo ratings yet
- Modul 6 Garis PengaruhDocument18 pagesModul 6 Garis Pengaruhovan05No ratings yet
- Contoh Mercu Ogee Dan Kolam Olakan Vlughter Dan UsbrDocument12 pagesContoh Mercu Ogee Dan Kolam Olakan Vlughter Dan Usbrvalentin uba.tNo ratings yet
- Analisa Struktur 2 (TM4)Document13 pagesAnalisa Struktur 2 (TM4)Aisyah Amelia ChaniagoNo ratings yet
- REKAYASA FUNGSI IIDocument2 pagesREKAYASA FUNGSI IISupriyadi BisronNo ratings yet
- Nyimas Tazkiah M (41118120055) TM 12 PDFDocument2 pagesNyimas Tazkiah M (41118120055) TM 12 PDFNYIMAS TAZKIAH MNo ratings yet
- Bab 5 Perenc BTG Tekan-1Document32 pagesBab 5 Perenc BTG Tekan-1Reza Artamevia100% (1)
- Abdul Rojak - Tugas Pekan 15 - Kuiz Mektan 2Document7 pagesAbdul Rojak - Tugas Pekan 15 - Kuiz Mektan 2Abdul Rojak100% (1)
- Kuliah 4 (CTH Perhit B Gempa) SNIDocument28 pagesKuliah 4 (CTH Perhit B Gempa) SNIfadilNo ratings yet
- SPL Kul 4 Homogen Web 1Document51 pagesSPL Kul 4 Homogen Web 1Aditya Hendra100% (1)
- Bab II Metode Distribusi MomenDocument28 pagesBab II Metode Distribusi MomenRockabilly San JoseNo ratings yet
- 06 Tegangan Normal Dalam BalokDocument53 pages06 Tegangan Normal Dalam BalokApriyanto PranotoNo ratings yet
- Materi IV Mekanika Tanah 2Document12 pagesMateri IV Mekanika Tanah 2Abi DardaNo ratings yet
- Tugas Mekanika Rekayasa 4Document9 pagesTugas Mekanika Rekayasa 4DA. RACHMANNo ratings yet
- TB 1Document4 pagesTB 1KELOMPOK 4 E501 MEKTAN 2No ratings yet
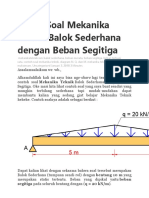
- Balok Sederhana dengan Beban SegitigaDocument9 pagesBalok Sederhana dengan Beban SegitigaAMa DaNl MechanicalNo ratings yet
- Teknik Pondasi II Distribusi Kelompok TiDocument4 pagesTeknik Pondasi II Distribusi Kelompok TiErdianto PratamaNo ratings yet
- Laporan Survei Drainase Kel 8Document11 pagesLaporan Survei Drainase Kel 8M.FAHRIZALNo ratings yet
- Metode Kemiringan Lendutan dan Perpindahan Matriks (39Document4 pagesMetode Kemiringan Lendutan dan Perpindahan Matriks (39Silvia KasturiNo ratings yet
- Konsep Derajat Ketidaktentuan StrukturDocument7 pagesKonsep Derajat Ketidaktentuan StrukturFikry Maulana100% (1)
- Percobaan Koefisien Kekasaran Dari Berbagai KemiringanDocument5 pagesPercobaan Koefisien Kekasaran Dari Berbagai KemiringanYuspi Halwi Aziz100% (1)
- Mekanika Tanah 2Document11 pagesMekanika Tanah 2jovan kawengianNo ratings yet
- STRUKTUR TARIK OPTIMALDocument5 pagesSTRUKTUR TARIK OPTIMALAguzt RzNo ratings yet
- MER 3-4 OfjointDocument6 pagesMER 3-4 OfjointebetNo ratings yet
- VektorDocument25 pagesVektorAbdulRo'uf100% (1)
- Linear AlgebraDocument49 pagesLinear AlgebraariefnuryuliartoNo ratings yet
- VEKTOR2D3DDocument21 pagesVEKTOR2D3Dvalerian leonyNo ratings yet
- DiktatDocument21 pagesDiktatYunia RizkaNo ratings yet
- 1 Matek 3 2022Document26 pages1 Matek 3 2022Reno AnugrahNo ratings yet
- Vektor Pada RuangDocument5 pagesVektor Pada RuangvegaNo ratings yet
- Halaman PengesahanDocument17 pagesHalaman PengesahanYulius ThuletNo ratings yet
- OTOTAMBALDocument13 pagesOTOTAMBALYulius Thulet100% (1)
- Rancang Bangun Alat Pengiris Bawang MerahDocument14 pagesRancang Bangun Alat Pengiris Bawang MerahYulius ThuletNo ratings yet
- Teknik KendaliDocument13 pagesTeknik KendaliYulius ThuletNo ratings yet
- Tugas Pak JokoDocument12 pagesTugas Pak JokoYulius ThuletNo ratings yet
- 8 Pencemaran UdaraDocument19 pages8 Pencemaran UdaraYulius ThuletNo ratings yet
- Proposal PKPI KUDocument10 pagesProposal PKPI KUYulius ThuletNo ratings yet
- Proposal PKPI KUDocument10 pagesProposal PKPI KUYulius ThuletNo ratings yet
- Proposal PKPI KUDocument11 pagesProposal PKPI KUYulius ThuletNo ratings yet
- Pengembangan ProdukDocument10 pagesPengembangan ProdukYulius ThuletNo ratings yet
- ProsesDocument9 pagesProsesYulius ThuletNo ratings yet
- Alat Pengangkat GalonDocument11 pagesAlat Pengangkat GalonYulius ThuletNo ratings yet
- Sistem Power Window Dan Central Door Lock Pada MobilDocument2 pagesSistem Power Window Dan Central Door Lock Pada MobilYulius ThuletNo ratings yet
- 3Document11 pages3Yulius ThuletNo ratings yet
- Bab 1Document16 pagesBab 1Yulius ThuletNo ratings yet
- Perencanaan Proses Cad Produk Berkepala Baut Untuk Aplikasi Cam Dengan Menerapkan Metode To CornerDocument11 pagesPerencanaan Proses Cad Produk Berkepala Baut Untuk Aplikasi Cam Dengan Menerapkan Metode To CornerYulius ThuletNo ratings yet
- Pertemuan 23Document13 pagesPertemuan 23Yulius ThuletNo ratings yet
- Bahan Pembuat Kampas Kopling Sepeda MotorDocument15 pagesBahan Pembuat Kampas Kopling Sepeda MotorYulius ThuletNo ratings yet
- Diet OCDDocument82 pagesDiet OCDDefa Arisandi Machmud AhmadNo ratings yet
- Bab 9Document25 pagesBab 9Yulius ThuletNo ratings yet
- Bab 9Document25 pagesBab 9Yulius ThuletNo ratings yet
- InterpolasiDocument26 pagesInterpolasiMamad SaputraNo ratings yet
- Pemeliharaan Dan Perbaikan Sistem HidrolikDocument159 pagesPemeliharaan Dan Perbaikan Sistem HidrolikCapphu ChinooNo ratings yet
- Pertemuan 24Document13 pagesPertemuan 24Yulius ThuletNo ratings yet
- Bab 9Document25 pagesBab 9Yulius ThuletNo ratings yet
- Pertemuan 23Document13 pagesPertemuan 23Yulius ThuletNo ratings yet
- 02-Roda Gigi LurusDocument54 pages02-Roda Gigi LurusYulius ThuletNo ratings yet
- 05-Kopling Tak Tetap & RemDocument24 pages05-Kopling Tak Tetap & RemYulius Thulet100% (5)