Professional Documents
Culture Documents
BAB II Seminar
Uploaded by
Agus Surya PutuCopyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
BAB II Seminar
Uploaded by
Agus Surya PutuCopyright:
Available Formats
6
BAB II LANDASAN TEORI
2. 1.
Mikrokontroller Mikrokontroler adalah suatu alat elektronika digital yang mempunyai masukan
dan keluaran serta kendali dengan program yang bisa ditulis dan dihapus dengan cara khusus, cara kerja mikrokontroler sebenarnya membaca dan menulis data. Mikrokontroler merupakan komputer didalam chip yang digunakan untuk mengontrol peralatan elektronik, yang menekankan efisiensi dan efektifitas biaya. Secara harfiahnya bisa disebut pengendali kecil dimana sebuah sistem elektronik yang sebelumnya banyak memerlukan komponen-komponen pendukung seperti IC TTL dan CMOS dapat direduksi/diperkecil dan akhirnya terpusat serta dikendalikan oleh mikrokontroler ini. Dengan penggunaan mikrokontroler ini maka :
Sistem elektronik akan menjadi lebih ringkas. Rancang bangun sistem elektronik akan lebih cepat karena sebagian besar dari sistem adalah perangkat lunak yang mudah dimodifikasi.
Pencarian gangguan lebih mudah ditelusuri karena sistemnya yang kompak Namun demikian tidak sepenuhnya mikrokontroler bisa mereduksi komponen
IC TTL dan CMOS yang seringkali masih diperlukan untuk aplikasi kecepatan tinggi atau sekedar menambah jumlah saluran masukan dan keluaran (I/O). Dengan kata lain, mikrokontroler adalah versi mini atau mikro dari sebuah komputer karena mikrokontroler sudah mengandung beberapa periferal yang langsung bisa
dimanfaatkan, misalnya port paralel, port serial, komparator, konversi digital ke analog (DAC), konversi analog ke digital dan sebagainya hanya menggunakan sistem minimum yang tidak rumit atau kompleks.
Arti mikrokontroler menurut winoto pakar robot :
Mikrokontroler adalah sebuah sistem mikroprosesor dimana didalamnya sudah terdapat CPU, ROM, RAM, I/O, clock dan peralatan internal lainnya yang sudah saling terhubung dan terorganisir (teralamati) dengan baik oleh pabrik pebuatnya dan dikemas dalam satu chip yang dipakai, sehingga kita tinggal memprogram isi ROM sesuai aturan penggunaan oleh pabrik yang membuatnya (2008).
2.2.
Mikrokontroler ATMega 8535 ATMega8535 adalah mikrokontroler CMOS 8 bit daya rendah berbasis
arsitektur RISC. Instruksi dikerjakan pada satu siklus clock, ATMega 8535 mempunyai throughput mendekati 1 MIPS per MHz, hal ini membuat ATMega 8535 dapat bekerja dengan kecepatan tinggi walaupun dengan penggunaan daya rendah. Mikrokontroler ATmega8535 memiliki beberapa fitur atau spesifikasi yang
menjadikannya sebuah solusi pengendali yang efektif untuk berbagai keperluan. Fitur-fitur tersebut antara lain: 1. Saluran I/O sebanyak 32 buah, yang terdiri atas Port A, B, C dan D 2. ADC (Analog to Digital Converter) 3. Tiga buah Timer/Counter dengan kemampuan perbandingan
4. CPU yang terdiri atas 32 register 5. Watchdog Timer dengan osilator internal 6. SRAM sebesar 512 byte 7. Memori Flash sebesar 8kb dengan kemampuan read while write 8. Unit Interupsi Internal dan External 9. Port antarmuka SPI untuk men-download program ke flash 10. EEPROM sebesar 512 byte yang dapat diprogram saat operasi 11. Antarmuka komparator analog 12. Port USART untuk komunikasi serial. Mikrokontroler AVR ATMega memiliki 40 pin dengan 32 pin diantaranya digunakan sebagai port paralel. Satu port paralel terdiri dari 8 pin, sehingga
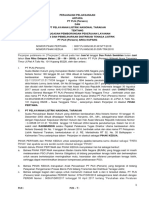
jumlah port pada mikrokontroler adalah 4port, yaitu port A, port B, port C dan port D. Sebagai contoh adalah port A memiliki pin antara portA.0 sampai dengan port A.7, demikian selanjutnya untuk port B, port C, port D. Diagram pinmikrokontroler dapat dilihat pada gambar berikut:
Gambar 2.1 Diagram Pin ATMega 8535
Berikut ini adalah tabel penjelasan mengenai pin yang terdapat pada mikrokontroler ATMega8535:
10
Tabel 2.1 Tabel Penjelasan pin pada mikrokontroler ATMega 8535
Vcc GND
Tegangan Suplai (5 Volt) Ground
RESET Input rset level rendah, pada pin ini selama lebih dari panjang pulsa minimum akan menghasilkan reset walaupun clock sedang berjalan. RST pada pin 9 merupakan reset dari AVR. Jika pada pin ini diberi masukan low selama minimal 2 machine cycle maka sistem akan di-reset. XTAL 1 Input penguat Osilator inverting dan input pada rangkaian operasi clock internal. XTAL 2 Output dari penguat osilator inverting. Avcc Pin tegangan suplai untuk port A dan ADC. Pin ini harus dihubungkan ke Vcc walaupun ADC tidak digunakan, maka pin ini harus dihubungkan ke Vcc melalui low pass filter Aref AGND pin referensi tegangan analog untuk ADC pin untuk analog ground. Hubungkan kaki ini ke GND, kecuali
jika boardmemiliki analog ground yang terpisah
Berikut ini adalah penjelasan dari pin mikrokontroler ATMega 8535 menurut port-nya masing-masing:
11
Port A memiliki pin 33 sampai dengan pin 40 yang merupakan 8 bit directional port I/O. Setiap pin-nya dapat menyediakan internal pull-up resistor (dapat diatur per bit). Output buffer port A dapat memberi arus 20 mA dan dapat
mengendalikan display LED secara langsung. Data Direction Register port A (DDRA) harus di-setting terlebih dahulu sebelum port A digunakan. Bit-bit DDRA diisi 0 jika ingin memfungsikan pin-pin port A yang disesuaikan sebagai input, atau diisi 1 jika sebagai output. Selain itu, pin-pin pada port A juga memiliki fungsi-fungsi alternatif khusus seperti yang dapat dilihat dalam tabel:
Tabel 2.2 Penjelasan pin pada port A
Pin PA.7 PA.6 PA.5 PA.5 PA.3 PA.2 PA.1 PA.0
Keterangan ADC7 (ADC Input Channel 7) ADC6 (ADC Input Channel 6) ADC7 (ADC Input Channel 5) ADC4 (ADC Input Channel 4) ADC3 (ADC Input Channel 3) ADC2 (ADC Input Channel 2) ADC1 (ADC Input Channel 1) ADC0 (ADC Input Channel 0)
Port B memili pin 1 sampai dengan pin 8 yang merupakan 8 bit directional port I/O. Setiappin-nya dapat menyediakan internal pull-up resistor (dapat diatur
12
per bit). Output
buffer
port B
dapat
memberi
arus
20
mA
dan
dapat
mengendalikan display LED secara langsung. Data Direction Register port B (DDRB) harus di-setting terlebih dahulu sebelum port B digunakan. Bit-bit DDRB diisi 0 jika ingin memfungsikan pin-pin port B yang disesuaikan sebagai input, atau diisi 1 jika sebagai output. Selain itu, pin-pin port B juga memiliki fungsi-fungsi alternatif khusus seperti yang dapat dilihat dalam tabel:
Tabel 2.3 Penjelasan pin pada port B
Pin PB.7 PB.6 PB.5 PB.4
Keterangan SCK (SPI Bus Serial Clock) VISO (SPI Bus Master Input/Slave Output) VOSI (SPI Bus Master Output/Slave Input) SS (SPI Slave Select Input) AIN1 (Analog Comparator Negative Input)OCC (Timer/Counter0 Output
PB.3
Compare Match Output) AIN0 (Analog Comparator Positive Input)INT2 (External Interrupt2
PB.2 PB.1
Input) T1 (Timer/Counter1 External Counter Input) T0 (Timer/Counter0 External Counter Input)XCK (JSART External Clock
PB.0
Input/Output)
Port C memiliki pin 22 sampai dengan pin 29. Port C sendiri merupakan port input atauoutput. Setiap pin-nya dapat menyediakan internal pull-up resistor (dapat
13
diatur per bit). Output buffer port C dapat memberi arus 20 mA dan dapat mengendalikan display LED secara langsung.Data Direction Register port C (DDRC) harus di-setting terlebih dahulu sebelum port C digunakan.Bit-bit DDRC diisi 0 jika ingin memfungsikan pin-pin port C yang disesuaikan sebagai input, atau diisi 1 jika sebagai output. Selain itu, pin-pin port D juga memiliki fungsi-fungsi alternatif khusus seperti yang dapat dilihat dalam tabel II.6:
Tabel 2.4 Penjelasan pin pada port C
Pin PC.7 PC.6 PC.1 PC.0
Keterangan TOSC2 (Timer Oscillator Pin 2) TOSC1 (Timer Oscillator Pin 1) SDA (Two-Wire Serial Bus Data Input/Output Line) SCL (Two-Wire Serial Bus Clock Line)
Port D memiliki pin 14 sampai dengan pin 20. Merupakan 8 bit directional port I/O. Setiap pin-nya dapat menyediakan internal pull-up resistor (dapat diatur per bit). Output buffer port D dapat memberi arus 20 mA dan dapat
mengendalikan display LED secara langsung. Data
Direction Register port D
(DDRD) harus di-setting terlebih dahulu sebelum port D digunakan. Bit-bit DDRD diisi 0 jika ingin memfungsikan pin-pin port D yang disesuaikan sebagai input, atau diisi 1 jika sebagai output. Selain itu, pin-pin port D juga memiliki fungsi-fungsi alternatif khusus seperti yang dapat dilihat dalam tabel:
14
Tabel 2.5 Penjelasan pin pada port D
Pin PD.0 PD.1 PD.2 PD.3 PD.4 PD.5 PD.6 PD.7
Keterangan RDX (UART input line) TDX (UART output line) INT0 (external interrupt 0 input) INT1 (external interrupt 1 input) OC1B (Timer/Counter1 output compareB match output) OC1A (Timer/Counter1 output compareA match output) ICP (Timer/Counter1 input capture pin) OC2 (Timer/Counter2 output compare match output)
Pada diagram blok ATMega8535 digambarkan 32 general purpose Working register yang dihubungkan secara langsung dengan Arithmetic Logic Unit (ALU). Sehingga memungkinkan duaregister yang berbeda dapat diakses dalam satu siklus clock.
15
Gambar 2.2 Diagram ATMega 8535
2. 3.
Motor stepper Motor stepper adalah motor DC yang gerakannya bertahap (step per step) dan
memiliki akurasi yang tinggi yang dikendalikan dengan pulsa-pulsa digital, bukan dengan memberikan tegangan yang terus-menerus. Deretan pulsa diterjemahkan menjadi putaran shaft, dimana setiap putaran membutuhkan jumlah pulsa yang
16
ditentukan. Satu pulsa menghasilkan satu kenaikan putaran atau step, yang merupakan bagian dari satu putaran penuh. Oleh karena itu, perhitungan jumlah pulsa dapat diterapkan untuk mendapatkan jumlah putaran yang diinginkan. Perhitungan pulsa secara otomatis menujukkan besarnya putaran yang telah dilakukan, tanpa memerlukan informasi balik (feedback). Ketepatan kontrol gerak motor stepper terutama dipengaruhi oleh jumlah step tiap putaran dalam satuan sudut (0.75, 0.9, 1.8); semakin banyak jumlah step, semakin tepat gerak yang dihasilkan. Untuk ketepatan yang lebih tinggi, beberapa driver motor stepper membagi step normal menjadi setengah step (half step) atau mikro step. Kecepatan motor stepper pada dasarnya ditentukan oleh kecepatan pemberian data pada komutatornya. Semakin cepat data yang diberikan maka motor stepper akan semakin cepat pula berputarnya. Pada kebanyakan motor stepper kecepatannya dapat diatur dalam daerah frekuensi audio dan akan menghasilkan putaran yang cukup cepat. Karakteristik dari motor stepper adalah sebagai berikut : 1. Tegangan Tiap motor stepper mempunyai teggangan rata-rata yang tertulis pada tiap unitnya atau tercantum pada data sheet masing-masing motor stepper. Tegangan rata-rata ini harus diperhatikan dengan seksama karena bila melebihi dari tegangan rata-rata ini akan menimbulkan panas yang menyebabkan kinerja putarannya tidak maksimal atau bahkan motor stepper akan rusak dengan sendirinya. 2. Resistansi
17
Resistansi per lilitan adalah karakterisktik yang lain dari motor stepper. Resistansi ini akan menentukan arus yang mengalir, selain itu juga akan mempengaruhi torsi dan kecepatan maksimum dan motor stepper. 3. Derajat per step Derajat per step adalah faktor terpenting dalam pemilihan motor stepper sesuai dengan aplikasinya. Tiap-tiap motor stepper mempunyai spesifikasi masing-masing, antara lain: 0.72 per step, 1.8 per step, 3.6 per step, 7.5 per step, 15 per step, dan bahkan ada yang 90 per step. Dalam pengoperasiannya kita dapat menggunakan 2 prinsip yaitu full step atau half step. Dengan full step berarti motor stepper berputar sesuai dengan spesifikasi derajat per stepnya, sedangkan half step berarti motor stepper berputar setengah derajat per step dari spesifikasi motor stepper tersebut. Motor stepper dibedakan menjadi dua kategori besar yaitu: magnet permanen dan reluktansi variabel. Tipe magnet permanen terbagi menjadi dua motor stepper yaitu motor stepper unipolar dan bipolar. Motor stepper unipolar sangat mudah untuk dikontrol dengan menggunakan rangkaian counter -n. Motor stepper unipolar mempunyai karakteristik khusus yaitu berupa lilitan center-tapped dan 1 lilitan sebagai common. Lilitan common akan mencatu tegangan pada center-tapped dan sebagai ground adalah rangkaian drivernya. Motor stepper unipolar dapat dikenali dengan mengetahui adanya lilitan center-tapped. Jumlah motor stepper adalah dua kali dan jumlah koilnya.Umumnya pada motor stepper unipolar terdapat dua buah koil.
18 Tabel 2.6 Pola 1-phase putaran motor stepper unipolar
Index 1a 1b 2a 2b 1 2 3 4 5 6 7 8 1 0 0 0 1 0 0 0 0 1 0 0 0 1 0 0 0 0 1 0 0 0 1 0 0 0 0 1 0 0 0 1
Pada prinsipnya ada dua macam cara kerja motor stepper unipolar, yaitu full-step dan half-step. Terlihat pada Tabel 2.7 dan Tabel 2.8.
Tabel 2.7 Pemberian tegangan untuk operasi full-step FULL STEP Tegangan yang diberikan pada lilitan Arah putar melawan jarum Arah putar searah jarum jam jam L3 1 2 1 0 L2 0 1 L1 0 0 L0 0 0 L3 0 0 L2 0 0 L1 0 1 L0 1 0
19
3 4
0 0
0 0
1 0
0 1
0 1
1 0
0 0
0 0
Pada full step, suatu titik pada sebuah kutub magnet di rotor akan kembali mendapat tarikan medan magnet stator pada lilitan yang sama setelah step ke 4 dan berikutnya dapat diberikan lagi mulai dari step 1. Setiap step rotor bergerak searah atau berlawanan dengan jarum jam sebesar spesifikasi derajat per step dan motor stepper. Setiap step hanya menarik sebuah kutub saja. Tegangan 1 adalah menunjukkan logika dalam level Transistor Logic (TL). Besar tegangan
sesungguhnya diatur dengan spesifikasi motor stepper yang dipakai, misalnya dengan menggunakan buffer.
Tabel 2.8 Pemberian tegangan untuk operasi half-step HALF STEP Tegangan yang diberikan pada lilitan Arah putar searah jarum jam L3 1 2 3 4 5 1 1 0 0 0 L2 0 1 1 1 0 L1 0 0 0 1 1 L0 0 0 0 0 0 Arah putar melawan jarum jam L3 0 0 0 1 1 L2 0 0 0 1 1 L1 0 1 1 1 0 L0 1 1 0 0 0
20
6 7 8
0 0 1
0 0 0
1 0 0
1 1 1
1 0 0
1 0 0
0 0 0
0 0 1
Untuk half step, setiap kutub magnet pada rotor akan kembali mendapatkan tarikan dan medan magnet lilitan yang sama setelah step ke 8. berikutnya kembali mulai step 1. Setiap step posisi rotor berubah sebesar setengah derajat dan spesifikasi derajat per step motor stepper. Berbeda dengan motor stepper unipolar, motor stepper bipolar sangat sulit dalam pengontrolannya. Motor stepper jenis ini memerlukan rangkaian driver yang kompleks. Keuntungan motor stepper bipolar adalah ukurannya yang besar dan dapat menghasilkan torsi yang besar daripada motor stepper unipolar. Motor stepper bipolar di desain dengan koil yang terpisah yang akan di catu dan dua arah (polaritas harus dibalik selama pencatuan). Motor stepper bipolar menggunakan logika yang sama seperti motor stepper unipolar yaitu hanya 0 dan 1 untuk merespon koilnya .
Tabel 2.9 Pola phase putaran motor stepper bipolar Index 1a 1b 2a 2b 1 2 3 + + + -
21
4 5 6 7 8
+ -
+ -
+ -
+ +
Reluktansi variabel motor stepper, juga sering disebut sebagai motor hibrid. Motor stepper jenis ini mudah dikontrol jika dibandingkan dengan jenis motor stepper yang lain. Rangkaian driver untuk mencatu tiap-tiap lilitannya sangatlah sederhana. Prinsip kerjanya adalah driver mencatu tiap lilitan secara bergantian. Jika diputar dengan tangan, terlihat motor ini seperti motor DC, berputar sangat bebas dan tidak terasa adanya step. Motor stepper jenis ini tidak memiliki magnet permanen seperti pada motor stepper unipolar dan bipolar.
Tabel 2.10 Pola 1-phase reluktansi variabel motor stepper Index 1 2 3 4 5 1 + + 2 + 3 + 4 + -
22
6 7 8
+ -
+ -
2.4.
Optocoupler Optocoupler adalah suatu piranti yang terdiri dari 2 bagian yaitu transmitter
dan receiver yaitu antara bagian cahaya dengan bagian deteksi sumber cahaya terpisah. Biasanya optocoupler digunakan sebagai saklar elektrik yang bekerja secara otomatis. Optocoupler adalah suatu komponen penghubung (coupling) yang bekerja berdasarkan picu cahaya optik. Optocoupler terdiri dari dua bagian yaitu A. Pada transmitter dibangun dari sebuah LED infra merah. Jika dibandingkan dengan menggunakan LED biasa, LED infra merah memiliki ketahanan yang lebih baik terhadap sinyal tampak. Cahaya yang dipancarkan oleh LED infra merah tidak terlihat oleh mata telanjang. B. Pada bagian receiver dibangun dengan dasar komponen phototransistor. Phototransistor merupakan suatu transistor yang peka terhadap tenaga cahaya. Suatu sumber cahaya menghasilkan energi panas, begitu pula dengan spektrum infra merah. Karena spekrum infra mempunyai efek panas yang lebih besar dari cahaya tampak, maka phototransistor lebih peka untuk menangkap radiasi dari sinar infra merah.
23
2.4.1. KARAKTERISTIK SENSOR Optocoupler merupakan salah satu jenis komponen yang memanfaatkan sinar sebagai pemicu on/off-nya. Opto berarti optik dan coupler berarti pemicu. Sehingga bisa diartikan bahwa optocoupler merupakan suatu komponen yang bekerja berdasarkan picu cahaya optik opto-coupler termasuk dalam sensor, dimana terdiri dari dua bagian yaitu transmitter dan receiver. Dasar rangkaian dapat ditunjukkan seperti pada gambar dibawah ini :
Gambar 2.3 Rangkaian Dasar Optocoupler
LED infra merah ini merupakan komponen elektronika yang memancarkan cahaya infra merah dengan konsumsi daya sangat kecil. Jika diberi prasikap maju,
24
LED infra merah yang terdapat pada optocoupler akan mengeluarkan panjang gelombang sekitar 0,9 mikrometer. Phototransistor memiliki sambungan kolektorbasis yang besar dengan cahaya infra merah, karena cahaya ini dapat membangkitkan pasangan lubang elektron. Dengan diberi prasikap maju, cahaya yang masuk akan menimbulkan arus pada kolektor. Phototransistor memiliki bahan utama yaitu germanium atau silikon yang sama dengan bahan pembuat transistor. Tipe phototransistor juga sama dengan transistor pada umumnya yaitu PNP dan NPN. Perbedaan transistor dengan phototransistor hanya terletak pada rumahnya yang memungkinkan cahaya infra merah
mengaktifkan daerah basis, sedangkan transistor biasa ditempatkan pada rumah logam yang tertutup.
2.5.
Keypad Keypad adalah rangkaian tombol yang berfungsi untuk memberi sinyal pada
suatu rangkaian dengan menghubungkan jalur-jalur tertentu. Keypad terdiri dari beberapa macam berdasarkan jumlah tombol dan fungsinya. Pada sistem
pengontrolan ini, digunakan keypad matriks 4 x 4 (16saklar).
25
Gambar 2.4 keypad matriks 4x4
Gambar 2.5 Rangkaian Keypad Matriks 4x4
26
Keypad Matriks dan konfigurasi keypad sebagai berikut : Kolom 1 pada PORTA.0 Kolom 2 pada PORTA.1 Kolom 3 pada PORTA.2 Kolom 4 pada PORTA.3 Baris 1 pada PORTA.4 Baris 2 pada PORTA.5 Baris 3 pada PORTA.6 Baris 4 pada PORTA.7 Prinsip dasar pada program : 1. Jika tombol 2 di tekan (S2) maka Kolom 2 Baris 1 terhubung atau PORTA.1 terhubungdengan PORTA.4, Jika tombol B di tekan (SB) maka Kolom 4 Baris 2 terhubung atau PORTA.3terhubung dengan PORTA.5, dst 2. Pin-pin KOLOM pada port tersebut dijadikan output dan pin-pin BARIS pada port tersebutdijadikan input, bisa juga sebaliknya terserah anda sebagai programmer, yang jelas salah satuoutput dan yang lain input. 3. Setiap saklar atau penekanan tombol, harus didefinisikan nilai dari tombol tersebut baik berupa nilai Desimal, Heksadesimal, maupun karakter ASCII.
27
4. Saat saklar (tombol keypad) ditekan dan BARIS dengan KOLOM terhubung maka terserahanda mendetaksi perubahan logika yang terjadi pada pin-pin INPUT. Apakah dari LOW ke HIGH (0 - 1) atau HIGH ke LOW (1 - 0). Pada Coding program untuk Keypad Matriks yang saya buat menggunakan nilai ASCII dan saat tombol ditekan mendeteksi perubahan logika dari HIGH ke LOW (1 - 0) atau rendah aktif dengan alasan sebagai berikut : 5. Nilai ASCII adalah nilai karakter seperti '1', '2', 'A', 'D', dst, yang pada listing program akanmudah dilihat nilainya dan mudah pahami, berbeda dengan desimal maupun heksadesimal. '1' =0x31 (heksa), '1' = 49 (desimal), 'A' = 0x41 (heksa), 'A' = 65 (desimal), dst 6. Pada penekanan tombol, mengapa mendeteksi HIGH ke LOW dari pada LOW ke HIGH. karena untuk mikrokotroler maupun rangkaian digital secara umum "menurunkan" tegangan berapapun ke 0 volt lebih mudah dan pasti dibandingkan "menaikkan" tegangan dari 0 volt kenilai tertentu.
2.5.1.Efek Pantulan (Bounching Effect)
Listing pada gambar belum termasuk menangani tentang bounching dan lainlain. Bounching pada keypad yaitu efek perubahan sinyal berkali-kali (pantulan) saat penekanan keypad yang menyebabkan keypad seolah-olah tombol keypad ditekan berkali-kali. Ada berbagai macam cara untuk mencegah menghilangkan efek bouncing ini baik dari segi hardware dan software yaitu :
28
Jika hardware maka dengan menambahkan filter frekuensi tinggi atau dengan IC555 untuk menambah lebar pulsa.
Jika software dengan menambah delay atau tundaan saat tombol ditekan atau dengan mendeteksi karakter tombol apakah sama dengan sebelumnya.
2.6.
LCD LCD (Liquid Cristal Display) adalah salah satu komponen elektronika yang
berfungsi sebagai tampilan suatu data, baik karakter, huruf ataupun grafik. Dipasaran tampilan LCD sudah tersedia dalam bentuk modul yaitu tampilan LCD beserta rangkaian pendukungnya termasuk ROM. LCD mempunyai pin data, kontrol catu daya, dan pengatur kontras tampilan.
29 Tabel 2.11 PIN LCD
Fungsi dari pin-pin pada rangkaian LCD yaitu:
1. Pin data dapat dihubungkan dengan bus data dari rangkaian lain seperti mikrokontroler dengan lebar data 8 bit. Pin RS (Register Select) berfungsi sebagai indikator atau yang menentukan jenis data yang masuk, apakah data atau perintah. Logika low menunjukan yang masuk adalah perintah, sedangkan logika high menunjukan data.
2. Pin R/W (Read Write) berfungsi sebagai instruksi pada modul jika low tulis data, sedangkan high baca data. Pin E (Enable) digunakan untuk memegang data baik masuk atau keluar.
30
3. Pin VLCD berfungsi mengatur kecerahan tampilan (kontras) dimana pin ini dihubungkan dengan trimpot 5 Kohm, jika tidak digunakan dihubungkan ke ground, sedangkan tegangan catu daya ke LCD sebesar 5 Volt.
2.7.
Catu Daya
Power Supply / catu daya adaptor yaitu suatu rangkaian elektronika yang berfungsi untuk mengatur suatu arus AC menjadi arus DC. Pengertian power supply yaitu Power ( Daya ), Supply ( Memberi ). Hampir semua rangkaian elektronik membutuhkan suatu sumber tegangan DC yang teratur dengan besar antara 5V hingga 30V.Di dalam automatic control, regulator adalah suatu alat yang mempunyai fungsi untuk mengatur besar kecilnya arus dan tegangan yang akan masuk ke dalam rangkaian elektronik. Sebagai salah satu contoh, dalam rangkaian yang dibuat ini dipakai regulator dapat berupa suatu trafo dengan perbandingan transformasi voltase yang dapat disesuaikan, atau suatu sirkuit elektronik yang bisa menghasilkan suatu voltase yang diinginkan. Voltage regulator sendiri merupakan suatu pengatur elektrik yang dirancang secara otomatis untuk memelihara tegangan dalam satu unit rangkaian elektronik secara konstan. Ini bisa dilakukan dengan menggunakan suatu mekanisme electromechanical, atau komponen elektronik aktip atau pasif.
Tergantung pada disain yang digunakan, mungkin saja digunakan untuk mengatur satu atau lebih arus bolak-balik atau DC voltages.
31
Banyak regulator power supply DC sederhana untuk mengatur voltase menggunakan shunt regulator seperti dioda zener, dan voltage regulator tube. Masing-masing dari alat ini mulai konduksi pada regulator yang disebut voltage regulator. Voltage tertentu dan akan berkonduksi sebanyak arus yang dibutuhkan untuk menahan voltase terminal hingga mencapai voltase yang telah ditentukan.
Gambar 2.6 Power Supply DC
1. Trafo : Menurunkan tegangan listrik bolak-balik (AC 110-220 ), menjadi tegangan listrik yang rendah sesuai dengan yang dibutuhkan.
2. Penyearah : Berfungsi mengubah tegangan listrik bolak-balik AC menjadi DC.
3. Kapasitor : Berfungsi menyaring / filtering tegangan hasil penyearah ( mengurangi faktor riple ).
32
4. Regulator : Menstabilkan tegangan / memantapkan tegangan.
Catu daya yang baik selalu dilengkapi dengan regulator tegangan. Tujuan pemasangan regulator tegangan pada catu daya adalah untuk menstabilkan tegangan keluaran apabila terjadi perubahan tegangan masukan pada catu daya. Salah satu tipe regulator tegangan tetap adalah LM 7805. Regulator tegangan tipe LM 7805 adalah salah satu regulator tegangan tetap dengan tiga terminal, yaitu terminal Vin, GND dan Vout. Tegangan keluaran dari regulator LM 7805 memungkinkan regulator untuk dipakai dalam sistem logika. Tegangan minimal yang diberikan yaitu 7 volt dan maksimal 25 volt.
You might also like
- Membangun Tim KerjaDocument642 pagesMembangun Tim KerjaHani Mardarani75% (4)
- Teori Organisasi PDFDocument279 pagesTeori Organisasi PDFTim EtanolNo ratings yet
- 1325-Article Text-2683-2-10-20210308Document5 pages1325-Article Text-2683-2-10-20210308Agus Surya PutuNo ratings yet
- JSA - Pemeliharaan Kubikel 20 KVDocument20 pagesJSA - Pemeliharaan Kubikel 20 KVAgus Surya Putu100% (1)
- HIRARCDocument11 pagesHIRARCAgus Surya PutuNo ratings yet
- MikrobiologiDocument1 pageMikrobiologiGosho Haries EdogawaNo ratings yet
- Surat Pernyataan Pelanggaran KerjaDocument2 pagesSurat Pernyataan Pelanggaran KerjaAgus Surya PutuNo ratings yet
- POLITIK KANTOR Menuju Puncak Karir Denga PDFDocument117 pagesPOLITIK KANTOR Menuju Puncak Karir Denga PDFAgus Surya PutuNo ratings yet
- Asik Asik K3Document6 pagesAsik Asik K3Agus Surya PutuNo ratings yet
- 53 Situs Freelance Yang Bisa Kamu CobaDocument16 pages53 Situs Freelance Yang Bisa Kamu CobaSam Picand van DominiqueNo ratings yet
- Tayangan Putu AgusDocument14 pagesTayangan Putu AgusAgus Surya PutuNo ratings yet
- Contoh Format Form Inspeksi k3Document2 pagesContoh Format Form Inspeksi k3Inka Purnamasari87% (15)
- Materi K3L Untuk PekerjaDocument26 pagesMateri K3L Untuk PekerjaAgus Surya PutuNo ratings yet
- Booklet Buku Saku K3 Share PDFDocument31 pagesBooklet Buku Saku K3 Share PDFSimson Mian Pahala Pardosi100% (1)
- Workplan 2019Document2,402 pagesWorkplan 2019Agus Surya PutuNo ratings yet
- PEMBONGKARAN JTM & JTRDocument16 pagesPEMBONGKARAN JTM & JTRAgus Surya Putu100% (3)
- Perancangan Sistem Informasi Keselamatan Dan Kesehatan Kerja Berbasis Web PDFDocument10 pagesPerancangan Sistem Informasi Keselamatan Dan Kesehatan Kerja Berbasis Web PDFAgus Surya PutuNo ratings yet
- Manual Peserta - Operational Excellence Ver 2.0Document49 pagesManual Peserta - Operational Excellence Ver 2.0Bagus Setyo25% (4)
- DALJJJDocument1 pageDALJJJAgus Surya PutuNo ratings yet
- NotulenDocument1 pageNotulenAgus Surya PutuNo ratings yet
- Tutorial - Update Faskes Tingak 1 Sesuai Kedudukan BPJS KesehatanDocument4 pagesTutorial - Update Faskes Tingak 1 Sesuai Kedudukan BPJS KesehatanAgus Surya PutuNo ratings yet
- Final Yantek NTT 2018 - 01072018Document15 pagesFinal Yantek NTT 2018 - 01072018Agus Surya PutuNo ratings yet
- Informasi PDFDocument38 pagesInformasi PDFAgus Surya PutuNo ratings yet
- INVESTIGASI KECELAKAANDocument6 pagesINVESTIGASI KECELAKAANBoy Rinaldi100% (1)
- Formulir Permohonan Restitusi SPPDDocument1 pageFormulir Permohonan Restitusi SPPDAgus Surya PutuNo ratings yet
- Operasi dan Pemeliharaan Distribusi ListrikDocument14 pagesOperasi dan Pemeliharaan Distribusi ListrikAgus Surya PutuNo ratings yet
- CORP-EXPOSUREDocument2 pagesCORP-EXPOSUREaguswiadiNo ratings yet
- Materi Sosialisasi LisdesDocument7 pagesMateri Sosialisasi LisdesAgus Surya PutuNo ratings yet
- Operasi dan Pemeliharaan Distribusi ListrikDocument14 pagesOperasi dan Pemeliharaan Distribusi ListrikAgus Surya PutuNo ratings yet
- Cara Lihat Uraian Jabatan di Aplikasi AMOR dalamDocument3 pagesCara Lihat Uraian Jabatan di Aplikasi AMOR dalamAgus Surya PutuNo ratings yet